

0 引言
目前,已有诸多学者对不同场景下的无人机航测航线设计开展了研究。针对建筑区域,盛辉等[6]对城市复杂区域建筑物的遮挡问题,根据侧视影像的临界点进行测区航线设计; 毕瑞等[7]的研究显示,对单体建筑环视航线获取数据效率更高,模型精度更好。针对复杂地形区域,魏铼等[8]针对滑坡地形,分析倾斜影像的角度及重叠度并设计航线; 王炳乾等[9]利用目标测区已有的数字表面模型(digital surface model,DSM)生成等高线并设计航线,其成果能更好地刻画地物侧面细节,同时可避免无人机飞行高度频繁变化。针对航飞安全,李天烁等[10]利用已有的实景三维模型辅助无人机航线设计,通过分析航线与模型是否相交判断其航线上是否存在障碍物。另外, Torres等[11]通过分析航线航向并对测区范围多边形分割,实现最小转弯次数的航线设计,减少无人机电量消耗; 徐博等[12]研究不规则多边形区域的航线规划算法,降低了无人机作业的多余覆盖率。上述航线设计尽管考虑了建筑、复杂地形区域及航线障碍物判断等,但针对条带状地形复杂区域的无人机航线规划研究较少,也没有开展有效的航线安全检测分析。
基于此,本文针对条带状地形复杂测区的几何特征,尝试提出一种无人机曲线航测航线设计方法,分别在平面和高程上开展曲线航线设计,并基于数字高程模型(digital elevation model,DEM)数据对航线进行安全检测分析。为验证该曲线航线设计的有效性,本文将利用Cesium三维框架及开源地理数据构建一个无人机航摄实景仿真平台,通过仿真平台进行曲线航线设计与航线安全检测算法的验证,然后进行实际航摄实验,验证航摄生产数据成果质量。
1 曲线航线设计
1.1 平面曲线航线设计
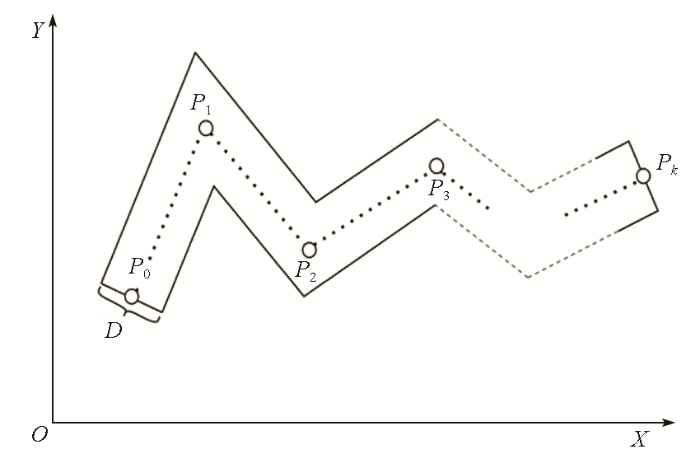
设带状区域的中心线由拐点P0,P1,…,Pk连接组成,并由中心线向两边扩展宽度D,构成条带状几何多边形。为了避免航线冗余,应设计出契合条带状测区几何形状的曲线航线。首先,获取该多边形顶点的最小经度值和最小纬度值,并选择一个经度、纬度均小于最小经纬度的点作为坐标原点O,以正东方向为X轴,正北方向为Y轴,构建本地平面直角坐标系,如图1所示。
图1
其次,确定影像的分辨率并结合相机参数计算航线的相对航高[13],即
式中: H为相对航高; f为相机焦距; a为像元尺寸(像元个数为m×n); GSD为地面分辨率。求得H后,可根据旁向重叠度Ey计算旁向航线间距Dy,并由条带状测区宽度D确定航线的最少条数Lnumb,以保证其能够覆盖整个测区,其公式为:
式中: m为相机水平方向像元个数; Lnumb取整数。
然后,利用中心线上的拐点计算其他航线上所有主要拐点的坐标。以奇数航线为例,第一次计算外扩航线拐点时t=1,计算第一点P0向左右两边外扩距离Dy的点坐标P'0和P″0。设P0(x0, y0)和P1(x1, y1),向量P0P1由P0点指向P1,计算P0P1的航向α,其值是向量与坐标系Y轴正半轴的夹角,即
式中: α的取值范围为(-π/2, π/2),而航向的范围为(0, 2π)。因此,需按不同情况对α进行处理,即
左右外扩2点P'0和P″0 到P0的方位角与P0P1航向垂直,因此位于P0P1左边的点P'0到P0的方位角θ=α-π/2,右边点P″0 到P0的方位角为θ=α+π/2,则
式中: (xp, yp)为待求点的坐标; L为航线间距; θ为待求点到P0点的方位角。分别带入P'0和P″0方位角可得到第一点P0的2个外扩点坐标。最后一个点Pk的两边外扩点计算方法与第一点P0的外扩点计算方法一致。
P1点到
式中: v1和v2分别为Pi点前后方向的单位向量,(xp, yp)为P'i 坐标。同样,对v1和v2向量去负方向即可求得P″i 坐标。
图2

奇数航线中心线可作为一条航线,航线条数为s时(s为奇数),需循环计算(s-1)/2次中心线的外扩,每次外扩距离为t∙Dy(t为当前计算的次数)。偶数航线则不包括中心线。偶数航线条数为s时,需要遍历计算中心线s/2次,每次外扩距离为(t-1/2)∙Dy。由此可得整个航线的所有拐点,按照逻辑顺序将它们串联起来构成主要航线。
最后,在前后相邻的2个航线拐点之间的航线上计算航摄点。设航向重叠度为Ex,相机纵向像元个数为n,则每2张影像的摄影基线B为:
假设航线2个拐点间的距离为S,从后一拐点开始向前一拐点方向每次增加距离B记为一个航摄点,则这段航线上航摄点的个数至少为t=S/B(t取整)个,这样才能保证航向重叠度基本满足任务要求。同理,计算每一段航线上的所有航摄点,构成整个条带状区域的平面曲线航线。
1.2 变高航线设计
式中: HEi为高航线第i个航摄点的高度。即与水平曲线航线相比,每个航点平面坐标(xi, yi)不变,将水平曲线航线航点三维坐标中的高程替换为DEM对应位置高程Hi与相对行高Hw之和,这样就获得了所需要的变高航线。
图3

图3
固定航高与变高航线示意图
Fig.3
Schematic diagram of fixed heading height and variable height route
1.3 航线安全检测
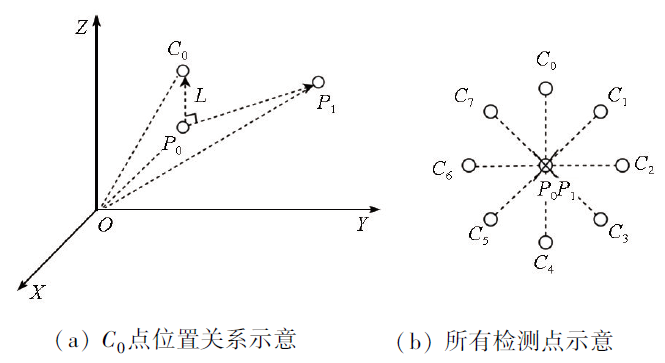
仿真平台没有提供三维缓冲区的构建和空间分析功能,难以直接实现航线安全性的检测。为此,本文借鉴缓冲区分析的思路,提出了一种八分角航线安全检测算法。首先构建局部三维坐标系,并将航线上所有航摄点的经纬度坐标都转换到局部三维坐标系下。其中,局部三维坐标系为右手空间直角坐标系,选择一个小于最小经度和纬度的点O作为坐标系原点,X轴指向正东,Y轴指向正北,Z轴竖直向上。然后设定航线安全缓冲范围L,并将每2个相邻的航摄点作为一个计算组,获取空间中的检测点。以P0P1为例,先求取第一个检测点C0的坐标,C0点需要满足以下条件: ①空间向量P0C0垂直于P0P1; ②OC0,OP0,OP13个向量位于同一平面; ③P0C0的距离为L。
这样就可以获得空间中满足条件的2个点,取其中一点作为C0(x, y, z)。已知P0(X0, Y0,Z0)和P1(X1, Y1, Z1),由P0C0垂直于P0P1可得:
再由OC0,OP0和OP1这3个向量共面可得:
设OP0×OP1的结果为(
求解该方程组可得一个特解x0=A+B,其中,A+=AH(AAH)-1为系数矩阵的广义逆。由此,对P0x0向量单位化并乘以距离L,即可得C0点的坐标。其他检测点坐标位置关系如图4所示,P0C2垂直于P0P1,且垂直于P0C0,C1点位于C0C2的中点,C4点位于P0C0反方向,C3点同样位于C2C4中点,C5,C6和C7点分别在向量P0C1,P0C2和P0C3的反方向。求取P0点到各检测点方向向量,单位化并乘距离L便可得到各点坐标。至此,计算得到均匀分布于P0点周围,距离为L的8个检测点。
图4
最后,在每个检测点上沿P0P1方向做射线检测,得到与三维地形的交点,若有其中任何一个检测点到地形交点的距离小于航摄点P0和P1之间的距离,则判定该段航线间安全范围内有障碍物,即航线存在安全隐患。
2 实验与结果分析
为了更好地进行条带状航测区域曲线航线设计、变高航线设计及航线安全检测的实验,本文利用Cesium框架构建了一个无人机航摄仿真平台,如图5所示。通过航摄仿真平台进行航摄方案航线的设计与评估,验证航线安全检测算法的有效性,然后利用设计的航线进行实际航摄实验,并分析航摄成果质量。为了提高实景仿真的效果,本文利用已有四川省某山区高分辨率无人机影像及高精度LiDAR DEM数据(精度为10 cm)作为参考底图数据进行实验。选择一个山谷区域作为实验区,该山谷底部区域呈曲线带状,长约944 m,中间部分宽度约为300 m,两侧坡度约32°,最大高差约381.7 m。
图5

2.1 曲线航线设计仿真实验
图6
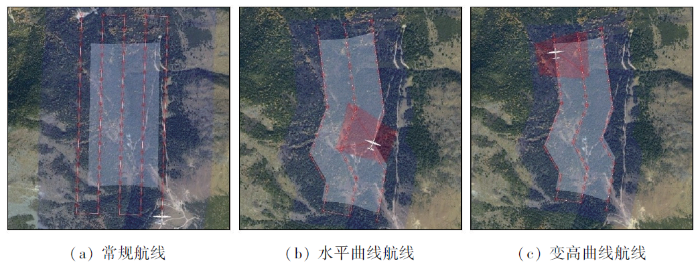
图6
不同航线单镜头航拍仿真
Fig.6
Simulation of single lens aerial photography of different routes
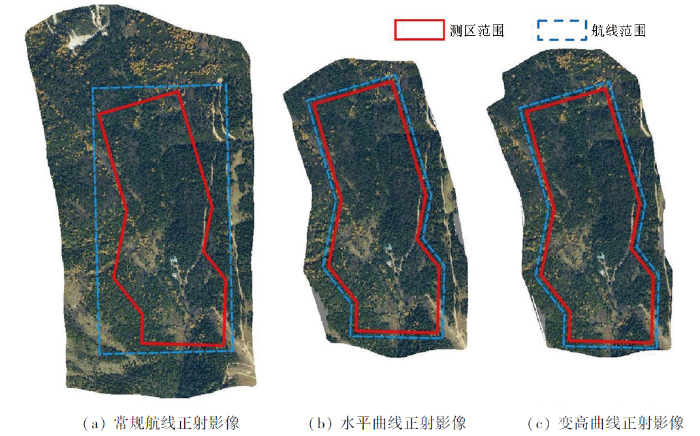
图7
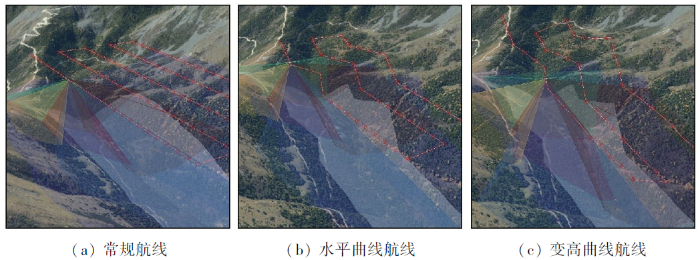
图7
不同航线五镜头倾斜航摄仿真
Fig.7
Simulation of five-shot tilt aerial photography of different routes
表1 生成不同航线参数
Tab.1
| 镜头 | 航线类型 | 航程/m | 影像数量/张 |
|---|---|---|---|
| 单镜头 | 常规航线 | 6 452.60 | 130 |
| 水平曲线航线 | 3 062.15 | 70 | |
| 变高曲线航线 | 3 153.34 | 70 | |
| 五镜头 | 常规航线 | 6 453.30 | 650 |
| 水平曲线航线 | 3 062.10 | 350 | |
| 变高曲线航线 | 3 151.50 | 350 |
图8
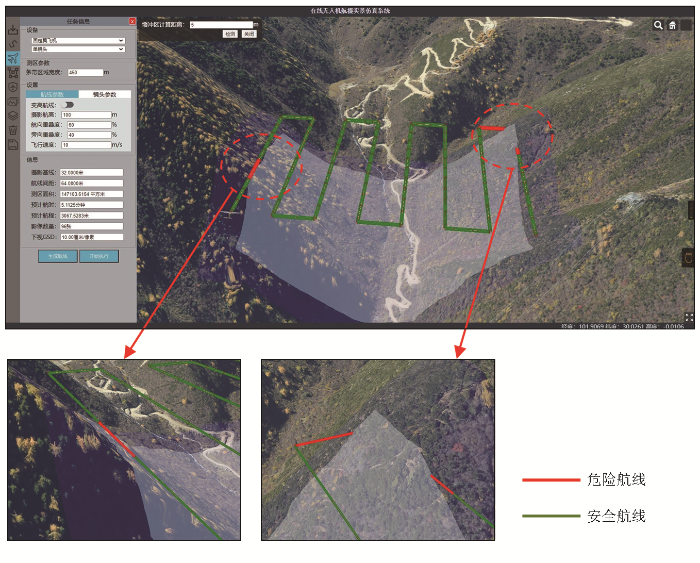
2.2 航线安全检测仿真实验
为了确保航飞的安全性,航线规划完成后需要对航线进行安全检测。测试区域位于某河谷地带,河谷两边是较陡的山坡,生成航线后,设置航线的安全缓冲范围并进行安全检测,结果如图9所示。航线上绿色部分判定为安全航线,红色部分则为存在安全隐患的航线。经多次航飞仿真测试,结果显示: 航线的安全检测方法能对航线的安全性、可行性给出反馈分析结果。
图9
2.3 曲线航线航摄实测
使用大疆M350无人机分别搭载高清数码相机和睿铂DG4M倾斜航摄相机,进行单镜头正射航拍和五镜头倾斜航拍实验。其中,高清数码相机为1英寸2 000万像素CMOS传感器相机,倾斜相传感器尺寸为35.9 mm×24 mm,像元尺寸为4.5 μm。将仿真实验中设计的航线导入无人机,使用与仿真实验相同的参数进行航摄任务。不同航线数据采集如图10所示,数据采集完成后,使用Context Capture软件,分别将单镜头航拍数据和五镜头倾斜航拍数据,制作成数字正射影像图(digital orthophoto map,DOM)和DEM,如图11(a)—(b)所示。在航测范围内选取检查点以验证DOM成果精度,检查点分布如11(a)所示,以参考底图数据上检查点坐标为基准,对3组航线采集生成DOM上的检查点坐标进行精度比较,结果如表2所示。同时,对不同航线生成的DEM进行预处理,将生成DEM经裁剪、重采样至与参考底图DEM数据相同的范围和分辨率,以参考底图DEM数据为基准,分别对不同航线生成DEM数据整体进行误差统计分析,结果见表3。
图10
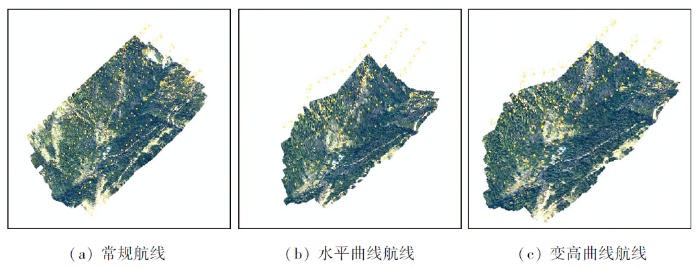
图11
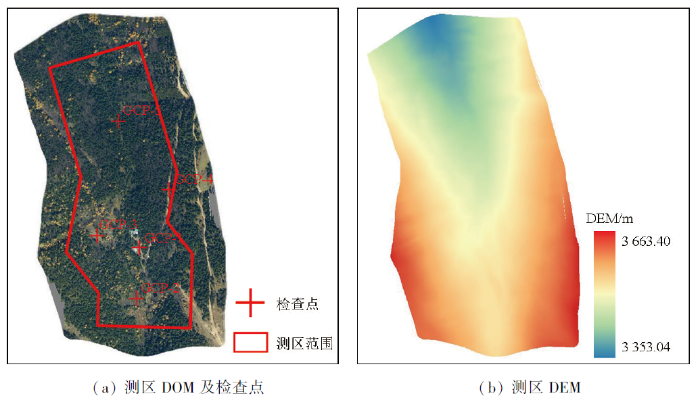
表2 不同航线DOM数据检查点误差
Tab.2
| 检查点 | 常规航线 | 水平曲线航线 | 变高曲线航线 | |||
|---|---|---|---|---|---|---|
| △x | △y | △x | △y | △x | △y | |
| GCP-1 | -0.002 1 | 0.001 3 | 0.001 2 | -0.003 0 | 0.001 8 | 0.000 0 |
| GCP-2 | -0.002 2 | 0.001 8 | -0.004 2 | 0.001 5 | 0.004 3 | -0.002 2 |
| GCP-3 | 0.004 2 | 0.003 9 | 0.004 1 | 0.002 4 | 0.005 2 | 0.003 8 |
| GCP-4 | 0.005 9 | 0.001 8 | -0.004 4 | -0.004 4 | 0.003 4 | 0.003 6 |
| GCP-5 | -0.002 3 | -0.001 8 | 0.001 9 | 0.003 3 | -0.002 1 | 0.001 6 |
表3 不同航线DEM数据误差对比
Tab.3
| 航线类型 | DEM平均误差 | DEM中误差 |
|---|---|---|
| 常规航线 | 0.465 9 | 0.711 6 |
| 水平曲线航线 | 0.486 5 | 0.717 0 |
| 变高曲线航线 | 0.326 4 | 0.422 7 |
3 结论
在分析常规航线设计方法在条带状复杂地形区域航测中存在不足的基础上,提出了一个无人机曲线航线设计方法。该方法包括水平曲线航线设计算法、变高航线设计算法及基于DEM的航线安全检测算法。通过在无人机航摄仿真平台进行航线设计仿真实验和实际的航摄实验,得到的主要结论如下:
1) 在条带状航测区域,相比于传统方法设计出的航线,使用曲线航线设计方法设计出的航线范围更加契合条带状测区,并且在航程和获取的影像数量上都更少,避免了航线及数据的冗余,提高了航测数据采集和处理的效率。
2) 基于DEM的航线安全检测方法,能够有效地对已设计航线的安全性和可行性进行检测,并反馈分析结果。
3) 相比于常规航线,使用本文曲线航线设计方法设计出的航线进行数据采集,其生成的DOM和DEM数字成果质量同样能满足基础地理信息数字成果的质量要求。
参考文献
轻小型无人机航摄技术现状及发展趋势
[J].
DOI:10.13474/j.cnki.11-2246.2015.0068
[本文引用: 1]

轻小型无人机因其获取影像机动灵活、影像分辨率高、成本低等优势, 成为传统航空摄影测量手段的有效补充, 已在测绘地理信息、防灾减灾、反恐维稳、农业估产、水利电力工程建设、铁路、公路带状选线工程, 以及西部1:5万地形图空白区测图工程、远离大陆的岛礁测绘等诸多领域发挥了积极作用。本文针对当前民用轻小型无人机航摄系统开展航空摄影和影像摄影测量处理的情况, 从航空摄影航线设计、搭载传感器情况、航摄质量快速检查、像控测量工作及影像摄影测量处理等方面阐述了现阶段民用轻小型无人机航空摄影及影像摄影测量处理的现状, 分析了现阶段轻小型无人机航摄技术存在的问题, 对下一阶段轻小型无人机航摄技术的发展提出了建议。
Aerial photogrammetric technology of light small UAV:Status and trend of development
[J].
Enhancing UAV-SfM 3D model accuracy in high-relief landscapes by incorporating oblique images
[J].
浅谈无人机倾斜摄影测量技术标准
[J].
Introduction to the standard of technology of tilt photogrammetry for UAV
[J].
无人机测绘任务方案设计与应用
[J].
Design and application of UAV surveying and mapping mission
[J].
Cooperative multi-UAV coverage mission planning platform for remote sensing applications
[J].
面向城市复杂区域的无人机倾斜摄影航线规划方法
[J].
DOI:10.13474/j.cnki.11-2246.2021.0009
[本文引用: 1]
本文针对城市复杂区域倾斜摄影建筑物遮挡问题,提出了一种无人机航线规划方法。该方法首先基于前期测区踏勘成果确定航线的高度范围,选择合适的高度并进行合理性验证;然后通过建筑最密集区域确定航线方向并计算重叠度;最终根据侧视影像临界点设计该区域的航线路径。本文以大型企业园区为例进行实景三维建模试验。结果表明,基于该方法建立的三维模型,每栋建筑均能保持完整的侧面纹理,且与飞行控制软件自动规划的航线相比,模型分辨率更高,纹理及整体效果更佳。
Route planning method for UAV inclined photography in complex urban areas
[J].
DOI:10.13474/j.cnki.11-2246.2021.0009
[本文引用: 1]
Aiming at the occlusion problem of inclined photography buildings in complex urban areas, a UAV route planning method is proposed. Firstly, the method confirms the height range of the route based on the reconnaissance results of the preliminary survey area, and chooses the proper height and verifies the rationality. Then it confirms the route direction and calculates the overlap degree through the most densely built area. Moreover, according to the critical point of the side view image, the route of this area is designed. This paper takes a large-scale enterprise park as an example to carry out real-life 3D modeling experiments. The relevant results indicate that the 3D model established in the light of this method keeps complete side texture of each building. Compared with the route automatically planned by flight control software, this model has higher resolution, better texture and whole effect.
不同地形环境下无人机航线规划及三维建模分析
[J].
DOI:10.13474/j.cnki.11-2246.2022.0115
[本文引用: 1]
针对不同地形环境下存在的飞行安全性低、数据冗余、构建三维模型质量和精度差等问题,本文以单镜头四旋翼小型无人机为试验设备,对平坦地形环境下的复杂单体建筑使用井字形交叉航线和环视航线;对复杂山地地形环境下的泥石流沟谷使用水平航线、井字形交叉航线及视频航线构建三维模型,并结合航线参数、三维模型质量和精度,探讨了不同地形环境下无人机航线规划方案对三维模型构建的影响。经评价分析可知:①使用环视航线能安全、快速地获取平坦地形下的复杂单体建筑影像,构建完整、质量好、精度高的三维模型;②使用井字形交叉航线能构建山地地形下泥石流沟谷的完整、质量好、精度高的三维模型,但飞行安全性、时效性较低;③使用视频航线,影像重叠度高,能构建完整、质量好的三维模型,模型精度并无明显差异。
UAV route planning and 3D mode-ling analysis in different terrain environment
[J].
单机倾斜摄影方式的无人机航线设计
[J].
Route planning of oblique photography with single camera
[J].
基于等高线构建无人机航线的新型仿地飞行策略
[J].
DOI:10.13474/j.cnki.11-2246.2020.0364
[本文引用: 1]
建筑物墙面、悬崖或危岩等目标物的立面信息对于地物精细化建模、地灾调查、分析、评估及防治等具有非常重要的作用。传统倾斜摄影测量获取影像的方式缺乏对地物立面信息的详细描述,在地形落差较大的地区也存在因影像重叠率不同而建模失败的情况。仿地飞行策略在一定程度上解决了上述问题,但其对于突然的高度变化,不能满足精细化建模的要求。本文提出了一种基于等高线构建无人机航线的新型仿地飞行策略,该方法基于目标区域的DSM生成等高线,经等高线简化、偏移等处理完成无人机航线的设计。通过试验将该方法构建的模型成果与传统仿地飞行方法建模成果相比较。结果表明,本文提出的方法可将悬崖上的危岩等刻画得更加真实,且相对于传统仿地飞行垂直于高度变化方向的航线设计为平行于等高线的航飞路线,避免了频繁的高度变化,有益于延长无人机执行飞行任务的时间,因此是一种有效、实用的航飞路线设计方法。
A new ground-like flight method based on contours to construct drone routes
[J].
DOI:10.13474/j.cnki.11-2246.2020.0364
[本文引用: 1]
The upright surface information of targets such as building walls, cliffs or dangerous rocks plays a very important role in the fine modeling of objects and investigation, analysis, evaluation and prevention of geological disasters. The images obtained by traditional oblique photogrammetry lack a detailed description of the vertical surface information of the target, and in areas with large changes in height difference, modeling may fail due to different image overlap rates. The ground-like flight strategy solves the above problems to a certain extent, but for areas with sudden changes in altitude, it is often unable to meet the requirements of refined modeling. This paper proposes a new ground-like flight method based on contour lines to construct drone routes. This method generates contour lines based on the DSM of the target area, and completes the design of the drone route through contour simplification and offset. The model results constructed by this method are compared with the modeling results of the traditional ground-simulating flight method. The experimental results show that the method proposed in this paper is more realistic for portraying dangerous rocks on cliffs. Moreover, compared with the traditional ground-like flight method, the flight route designed in this paper avoids frequent altitude changes, which is beneficial to extend the time for the UAV performing flight tasks. Therefore, the new ground-like flight method based on contour lines to construct drone routes proposed in this paper is a very effective and practical flight route design method.
实景三维模型辅助下小型多旋翼无人机航线设计
[J].
Air route design method of multi-rotor unmanned aerial vehicles assisted by real 3D model
[J].
Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction
[J].
基于无人机航向的不规则区域作业航线规划算法与验证
[J].
Route planning algorithm and verification based on UAV operation path angle in irregular area
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}