A spherical coordinate integration method for extracting crown volumes of individual trees based on the TLS point clouds
MA Weifeng1,2,3(), WU Xiaodong2,4, WANG Chong2, WEN Ping2, WANG Jinliang1,3, CAO Lei2, XIAO Zhenglong2
1. Faculty of Geography, Yunnan Normal University, Kunming 650500, China 2. Power China Kunming Engineering Corporation Limited, Kunming 650000, China 3. Center for Geospatial Informatin Engineering and Technology of Yunnan Province, Kunming 650500, China 4. Institute of International Rivers and Eco-security, Yunnan University, Kunming 650500, China
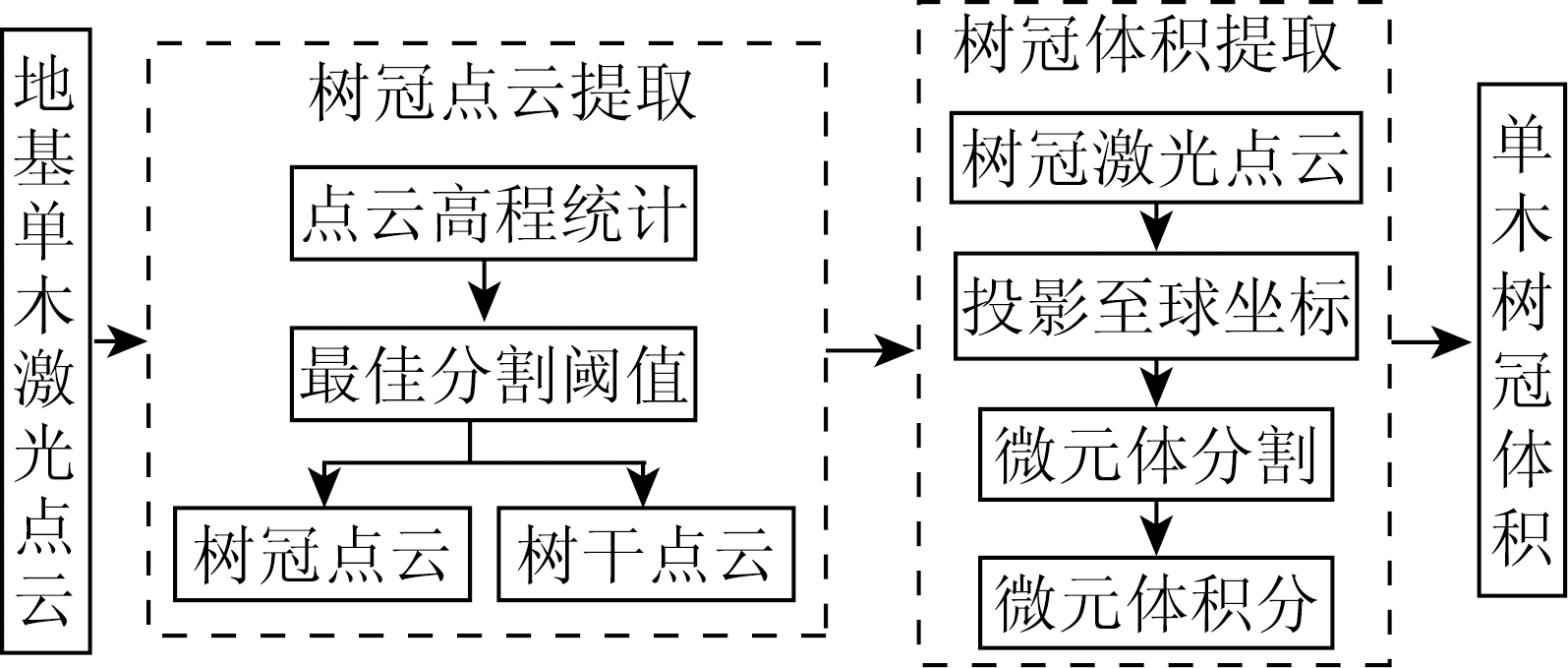
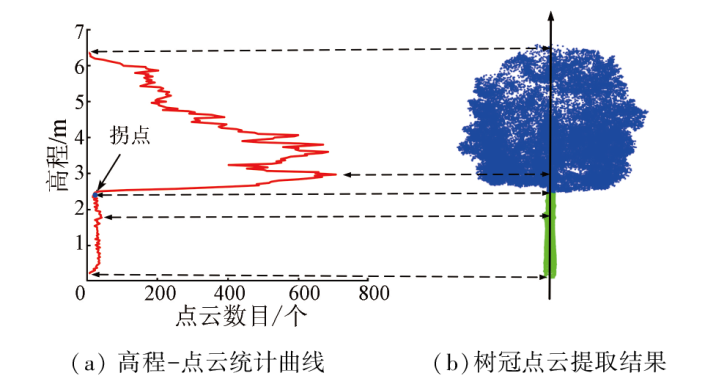
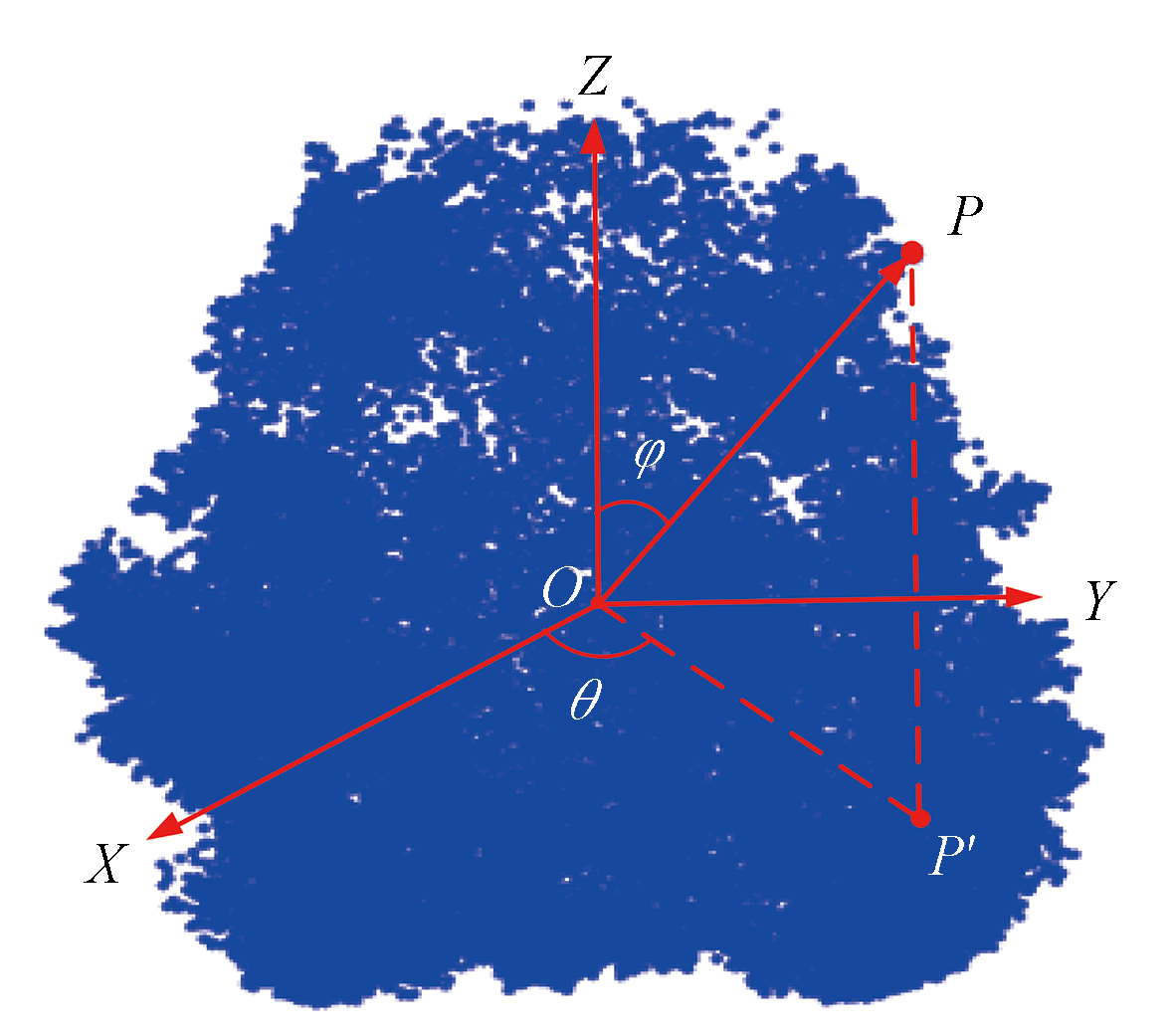
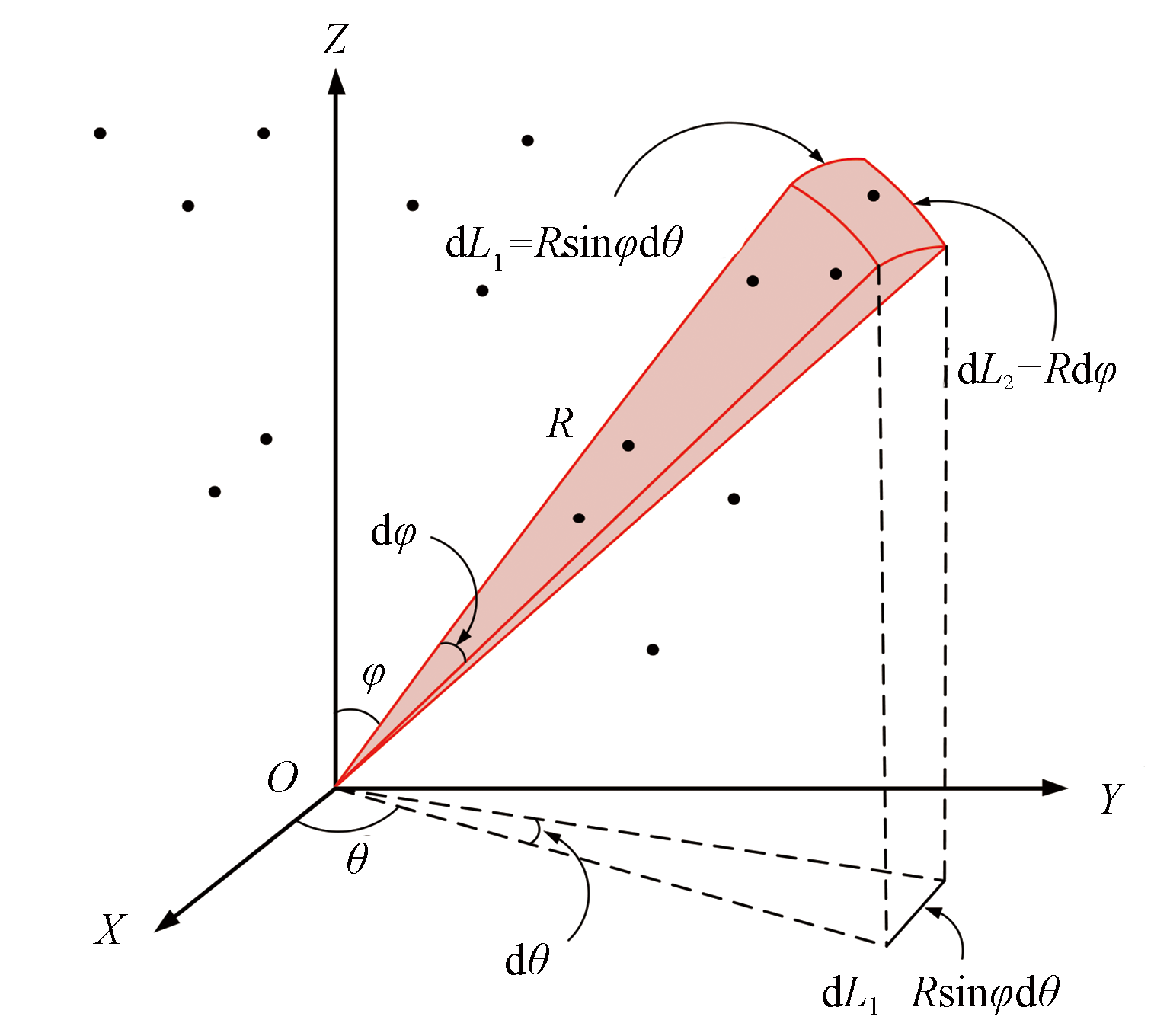
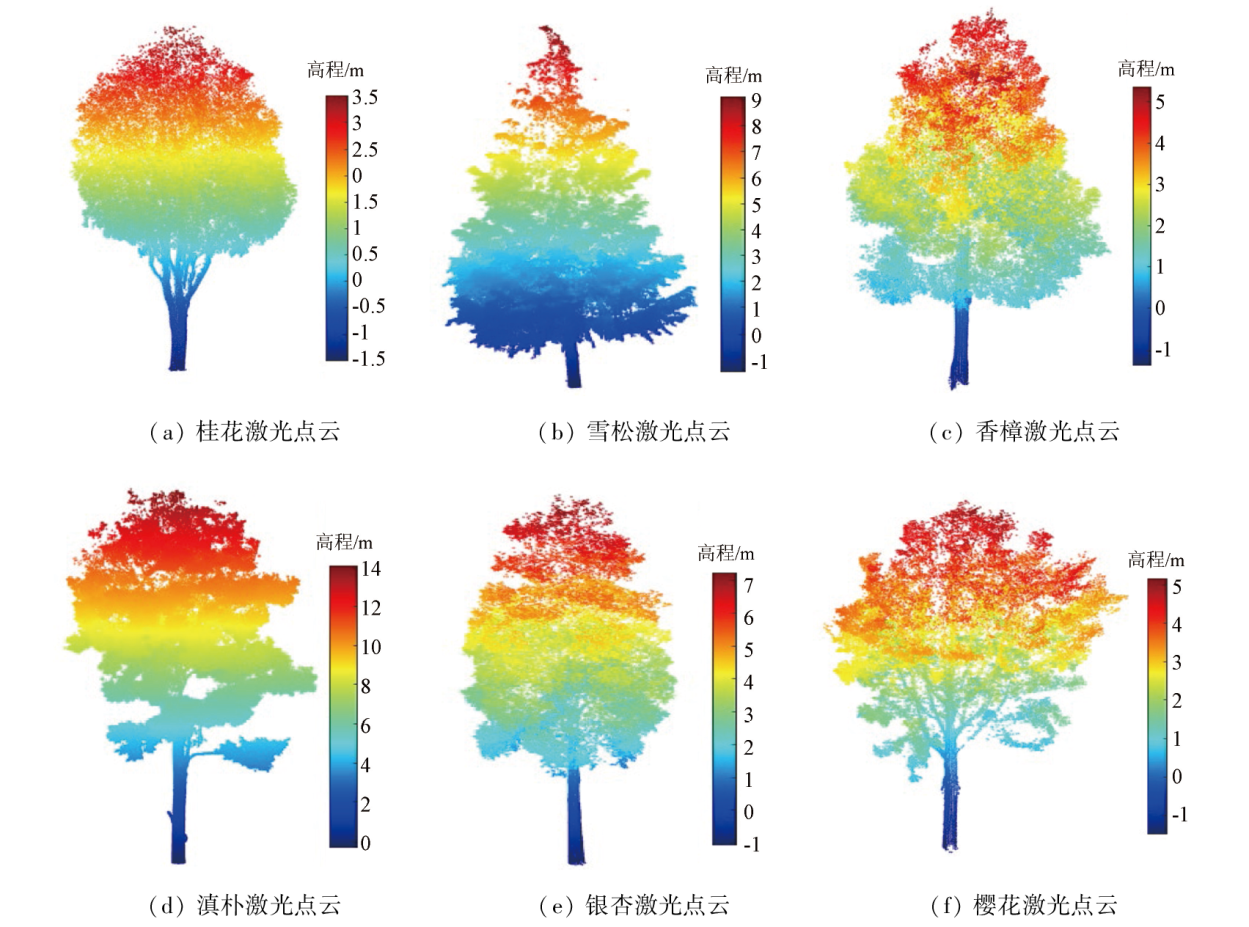
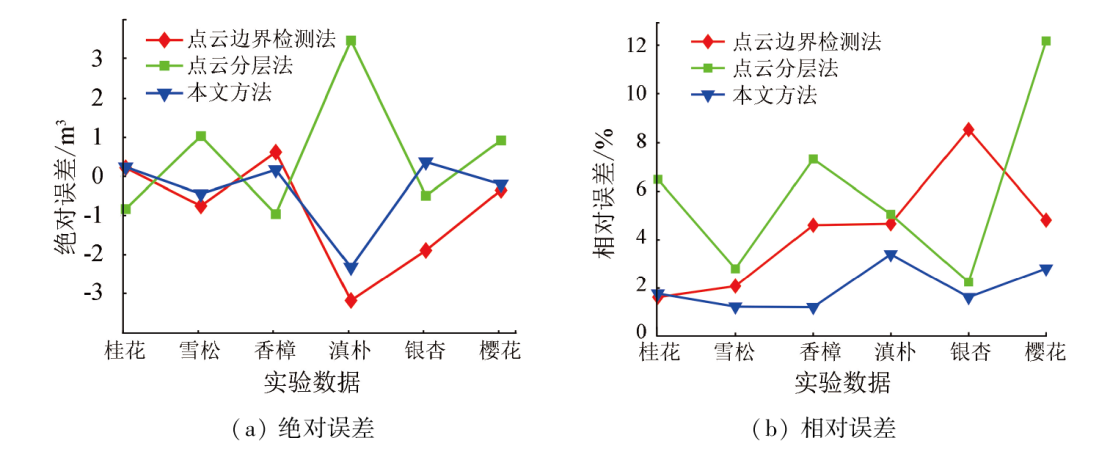
Crown volumes serve as a crucial factor for surface ecological monitoring. Laser point clouds can characterize the fine-scale spatial morphologies of individual trees, providing a data basis for crown volume extraction. However, existing laser point cloud-based methods for extracting crown volumes of individual trees are sensitive to parameters and exhibit low degrees of automation. Based on the analysis of the three-dimensional morphological structures of individual trees, this study proposed a spherical coordinate integration method for extracting crown volumes of individual trees based on the terrestrial laser scanning (TLS) point clouds. First, the crown points were obtained through visual elevation threshold-based segmentation according to the elevation distributions of TLS point clouds. Then, the TLS point clouds were projected onto the spherical coordinate space for infinitesimal segmentation into triangular pyramids. Finally, the crown volumes were determined through the three-dimensional spherical coordinate integration. Six types of TLS point cloud data for individual trees were selected for tests. As indicated by the test results, the proposed method effectively considers factors like crown morphology and point cloud density, achieving a maximum absolute error of 2.33 m3 and a maximum relative error of 3.40% in the crown volume extraction of individual trees. It manifests higher extraction accuracy and stability compared to the existing methods. Therefore, this study holds significant reference value for extracting tree parameters based on TLS point clouds.
麻卫峰, 吴小东, 王冲, 闻平, 王金亮, 曹磊, 肖正龙. 地基激光雷达单木树冠体积提取球坐标积分法[J]. 自然资源遥感, 2024, 36(3): 81-87.
MA Weifeng, WU Xiaodong, WANG Chong, WEN Ping, WANG Jinliang, CAO Lei, XIAO Zhenglong. A spherical coordinate integration method for extracting crown volumes of individual trees based on the TLS point clouds. Remote Sensing for Natural Resources, 2024, 36(3): 81-87.
Zhang R Y, Pang Y, Li Z Y, et al. Canopy closure estimation in a temperate forest using airborne LiDAR and Landsat ETM+ data[J]. Chinese Journal of Plant Ecology, 2016, 40(2):102-115.
Ma Z Y, Zhang H Q, Li Y L, et al. Diversity model and growth si-mulation of tree[J]. Journal of Geo-Information Science, 2018, 20(10):1422-1431.
[3]
Zou F, Li A, Wang Q. Comparative analysis of new forest resources survey methods[J]. Journal of Physics:Conference Series, 2020, 1646(1):012007.
[4]
Vauhkonen J, Næsset E, Gobakken T. Deriving airborne laser scanning based computational canopy volume for forest biomass and allometry studies[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 96:57-66.
Yu D H, Feng Z K. Tree crown volume measurement method based on oblique aerial images of UAV[J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(1):90-97.
[6]
Zhu Z, Kleinn C, Nölke N. Assessing tree crown volume:A review[J]. Forestry:An International Journal of Forest Research, 2021, 94(1):18-35.
[7]
Schlund M, Erasmi S, Scipal K. Comparison of aboveground biomass estimation from InSAR and LiDAR canopy height models in tropical forests[J]. IEEE Geoscience and Remote Sensing Letters, 2020, 17(3):367-371.
Gong Y X, He C, Feng Z K, et al. Amended delaunay algorithm for single tree factor extraction using 3-D crown modeling[J]. Tran-sactions of the Chinese Society for Agricultural Machinery, 2013, 44(2):192-199.
[9]
Lin Y, Jaakkola A, Hyypp J, et al. From TLS to VLS:Biomass estimation at individual tree level[J]. Remote Sensing, 2010, 2(8):1864-1879.
Liu F, Feng Z K, Yang L Y, et al. Estimation of tree crown volume based on 3D laser point clouds data[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3):328-334.
[11]
Korhonen L, Vauhkonen J, Virolainen A, et al. Estimation of tree crown volume from airborne LiDAR data using computational geometry[J]. International Journal of Remote Sensing, 2013, 34(20):7236-7248.
[12]
Yan Z, Liu R, Cheng L, et al. A concave hull methodology for calculating the crown volume of individual trees based on vehicle-borne LiDAR data[J]. Remote Sensing, 2019, 11(6):623.
Lin S, Tian L Y, Bi J X, et al. Accurate calculation of single-tree crown volume based on 3D laser scanning data[J]. Science of Surveying and Mapping, 2020, 45(8):115-122.
[14]
Xiao W, Xu S, Elberink S O, et al. Individual tree crown modeling and change detection from airborne LiDAR data[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016, 9(8):3467-3477.
Cheng G, Wang J Y, Yang J, et al. Calculation method of 3D point cloud canopy volume based on improved α-shape algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(5):175-183.
[16]
Hess C, Härdtle W, Kunz M, et al. A high-resolution approach for the spatiotemporal analysis of forest canopy space using terrestrial laser scanning data[J]. Ecology and Evolution, 2018(13): 6800-6811.
doi: 10.1002/ece3.4193
pmid: 30038776
Wei X H, Wang Y G, Zheng J, et al. Tree crown volume calculation based on 3-D laser scanning point clouds data[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(7):235-240.
 2024, Vol. 36
2024, Vol. 36  ), 吴小东2,4, 王冲2, 闻平2, 王金亮1,3, 曹磊2, 肖正龙2
), 吴小东2,4, 王冲2, 闻平2, 王金亮1,3, 曹磊2, 肖正龙2