|
|
 |
|

|
|
|
Point cloud segmentation on the roof of complicated building based on the algorithm of region growing |
Juntao ZHU1,2, Lei WANG1,2( ), Chuan ZHAO3, Xudong ZHENG1,2 ), Chuan ZHAO3, Xudong ZHENG1,2 |
1. College of Geomatics and Geoinformation, Guilin University of Technology, Guilin 541006, China
2. Guangxi Key Laboratory of Spatial Information and Geomatics, Guilin 541006, China
3. Institute of Surveying and Mapping, Information Engineering University, Zhengzhou 450001, China |
|
|
|
|
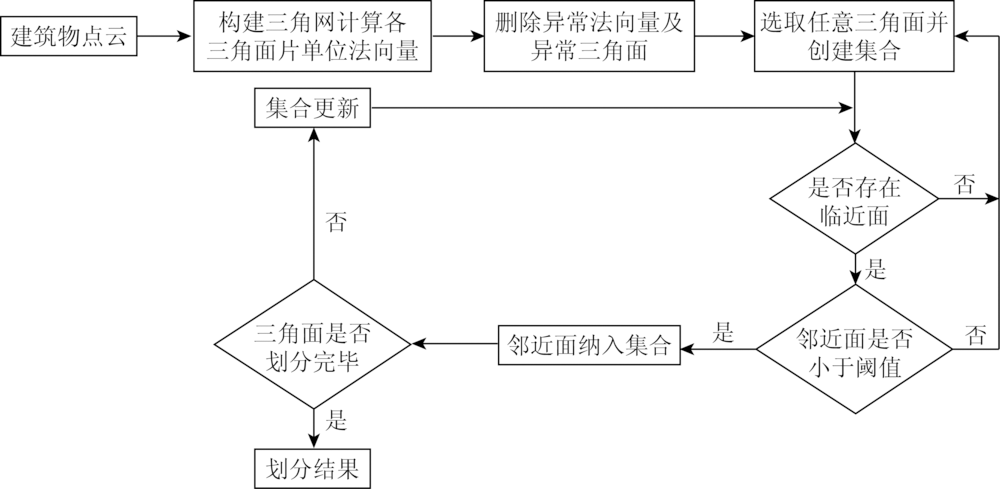
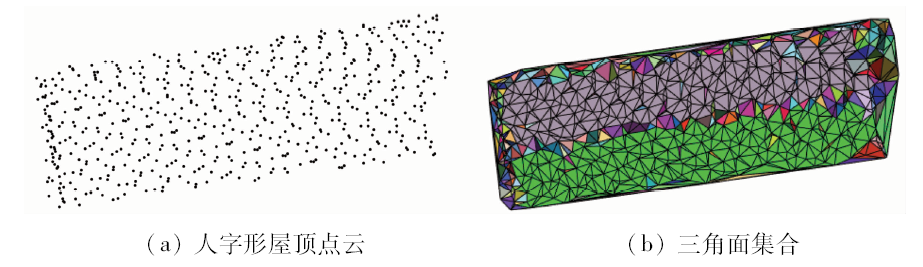
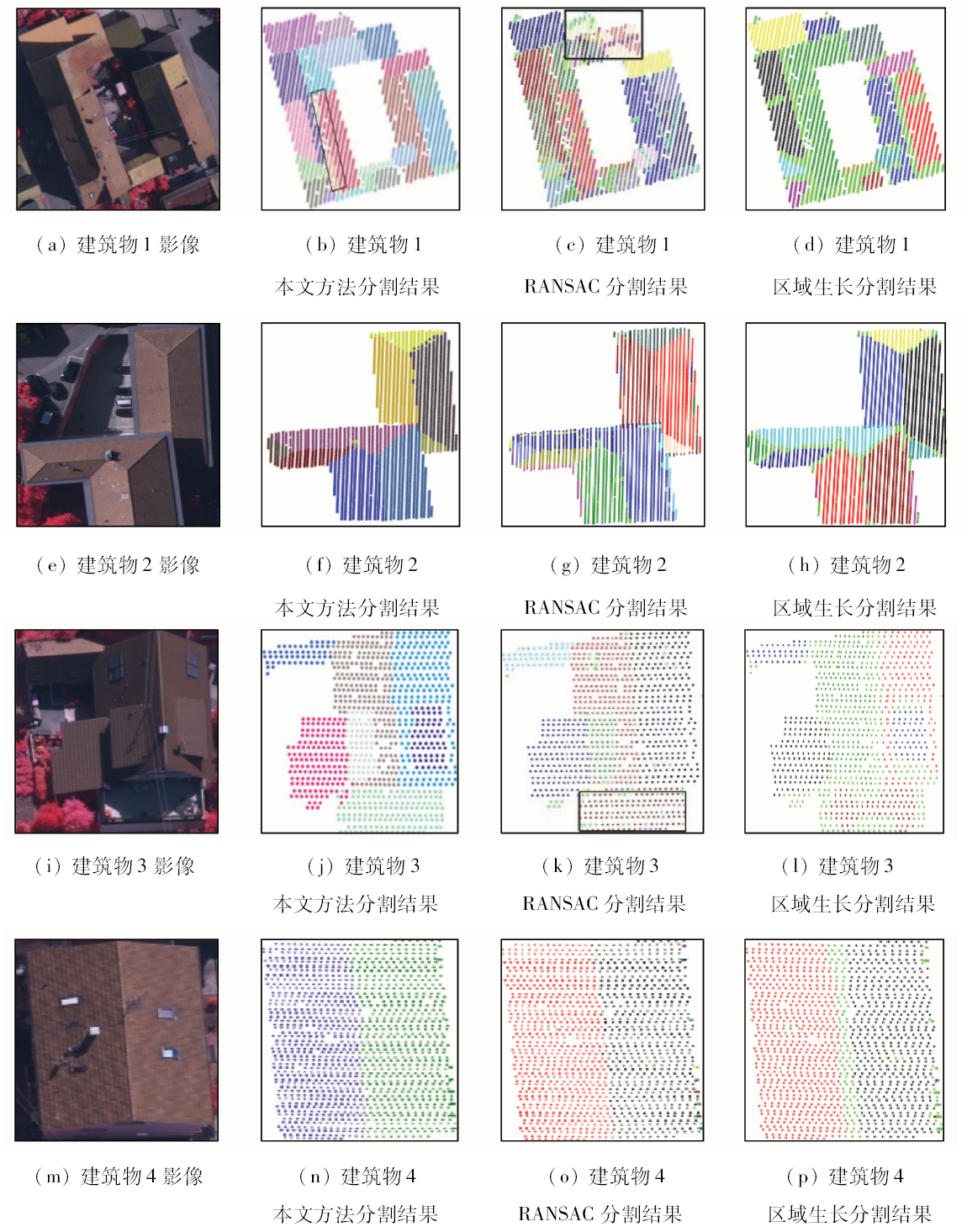
Abstract Segmenting light detection and ranging (LiDAR) point cloud of building accurately is the important section in the reconstruction of three-dimensional model. In view of the complex roof structure of complex buildings and poor segmentation accuracy of the existing algorithms, the authors put forward a kind of algorithm of region growing with the basic element of triangles to segment the point cloud of the building. First of all, Delaunay triangulation network is constructed, correlation is set up among laser points, unit normal vectors of triangles are calculated, initial partition is conducted on point cloud with the character that vectors in unit vector approach of triangles on the same plane of the building are basically consistent; then, because dispersion and deviation of point cloud could produce many disheveled triangles, dissection is conducted on points that are composed of disheveled triangles; based on good robustness of random sample consensus (RANSAC) algorithm, boundaries of planes of the building combining are obtained with Alpha Shape algorithm, plane and isolated point are combined in over-segmentation. The test result shows that the point cloud segmentation on the roof of the building is ideal in integrity, accuracy and quality with the method put forward in this paper.
|
| Keywords
LiDAR point cloud
Delaunay triangulation network
RANSAC algorithm
Alpha Shape algorithm
|
|
|
|
Corresponding Authors:
Lei WANG
E-mail: 794007279@qq.com
|
|
Issue Date: 03 December 2019
|
|
|
| [1] |
Chen D, Zhang L Q, Li J , et al. Urban building roof segmentation from airborne LiDAR point clouds[J]. International Journal of Remote Sensing, 2012,33(20):6497-6515.
|
| [2] |
Fischler M A, Bolles R C . Random sample consensus:A paradigm for model fitting with applications to image analysis and automated cartography[J]. Readings in Computer Vision, 1987: 726-740.
|
| [3] |
李云帆, 谭德宝, 刘瑞 , 等. 顾及建筑物屋顶结构的改进RANSAC点云分割算法[J]. 国土资源遥感, 2017,29(4):20-25.doi: 10.6046/gtzyyg.2017.04.04.
|
| [3] |
Li Y F, Tan D B, Liu R , et al. An improved RANSAC algorithm for building point clouds segmentation in consideration of roof structure[J]. Remote sensing for Land and Resources, 2017,29(4):20-25.doi: 10.6046/gtzyyg.2017.04.04.
|
| [4] |
赵传, 张保明, 郭海涛 , 等. 基于法向量密度聚类的LiDAR点云屋顶面提取[J]. 测绘科学技术学报, 2017,34(4):393-398.
|
| [4] |
Zhao C, Zhang B M, Guo H T , et al. Roof extract using LiDAR point clouds based on normal vector density-based clustering[J]. Journal of Geomatics Science and Technology, 2017,34(4):393-398.
|
| [5] |
赵传, 张保明, 陈小卫 , 等. 一种利用点云邻域信息的建筑物屋顶面高精度自动提取方法[J]. 测绘学报, 2017,46(9):1123-1134.
|
| [5] |
Zhao C, Zhang B M, Chen X W , et al. Accurate and automatic building roof extraction using neighborhood information of point clouds[J]. Acta Geodaetica et Cartographica Sinica, 2017,46(9):1123-1134.
|
| [6] |
李仁忠, 刘阳阳, 杨曼 , 等. 基于改进的区域生长三维点云分割[J]. 激光与光电子学进展, 2018,55(5):319-325.
|
| [6] |
Li R Z, Liu Y Y, Yang M , et al. Three-dimensional point cloud segmentation algorithm based on improved region growing[J]. Laser and Optoelectronics Progress, 2018,55(5):319-325.
|
| [7] |
于海洋, 余鹏磊, 谢秋平 , 等. 机载LiDAR数据建筑物顶面点云分割方法研究[J].测绘通报,2014(6):20-23.
|
| [7] |
Yu H Y, Yu P L, Xie Q P , et al. Building top segmentation with airborne LiDAR point cloud data[J].Bulletin of Surveying and Mapping,2014(6):20-23.
|
| [8] |
Rabbani T, Heuvel F A V D, Vosselman G, .Segmentation of point clouds using smoothness constraint [C]//International Archives of Photogrammetry,Remote Sensing and Spatial Information Sciences.ISPRS, 2012: 248-253.
|
| [9] |
邹万红, 陈志杨, 叶修梓 , 等. 一种新的点云数据特征骨架提取方法[J]. 浙江大学学报(工学版), 2008,42(12):2103-2107.
|
| [9] |
Zou W H, Chen Z Y, Ye X Z , et al. A new method for extracting feature skeleton from point cloud[J]. Journal of Zhejiang University(Engineering Science), 2008,42(12):2103-2107.
|
| [10] |
Edelsbrunner H, Kirkpatrick D, Seidel R . On the shape of a set of points in the plane[J]. Information Theory IEEE Transactions on, 1983,29(4):551-559.
|
| [11] |
Yang Z, Jiang W, Xu B , et al. A convolutional neural network-based 3D semantic labeling method for ALS point clouds[J]. Remote Sensing, 2017,9(9):936.
|
| [12] |
Awrangjeb M, Fraser C S . An automatic and threshold-free performance evaluation system for building extraction techniques from airborne LiDAR data[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014,7(10):4184-4198.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|
 2019,
Vol. 31
2019,
Vol. 31