
0 引言
计算机视觉中通常在特征匹配结束后,利用匹配得到的同名点采用随机抽样一致方法估计影像之间的单应矩阵或者基本矩阵,将不符合单应矩阵或者基本矩阵约束的点判定为误匹配点进行剔除[3,4]。这种方法需要设定用于区分内外点的阈值,阈值的设定对于结果的影响较大。特别是当一批影像中误匹配点的比率有较大的浮动时,阈值的设定更加困难。摄影测量学的处理策略是在光束法平差的过程中进行粗差的探测与剔除,常用的方法有数据探测法和选权迭代法。数据探测法的理论基础是统计学中的假设检验,该方法能发现粗差,但是定位困难,且每次只能检测一个观测值。选权迭代法是在平差的过程中按依据残差选定的权函数动态调整每个观测值在下一次计算中的权值,常用的权函数有丹麦法、El-Hakim法和李德仁法等[5,6,7,8]。然而对于无人机影像中存在较多的误匹配点的情况,选权迭代法的效果也并不理想。
1 方法流程
1.1 光束法平差
无人机影像的成像模型为共线条件方程[7],设x,y为像点的像平面坐标; x0,y0,f为影像的内方位元素; XS,YS,ZS为摄站点的物方空间坐标; X,Y,Z为物方点的物方空间坐标; △x和△y分别为x和y方向的系统误差; ai,bi,ci(i = 1,2,3)为影像的 3 个外方位角元素组成的 9 个方向余弦,则
光束法平差的基本数学模型也是共线条件方程。由于影像坐标观测值是未知数的非线性函数,因此需要进行泰勒展开,对观测方程线性化处理得到误差方程,即
式中cij(i=1,2; j=1,2,…,9)为代价函数对待求参数的导数,dXS,dYS,dZS,dφ,dω,dκ,dX,dY,dZ为待求参数的改正数; lx和ly分别为利用当前内外方位元素得到的像方坐标、与观测值的差值。以矩阵的形式表示为,
式中: V=(vx,vy)T; X=(dXS,dYS,dZS,dφ,dω,dκ,dX,dY,dZ)T; A=
误差方程通常采用最小二乘的方法来解算,最小二乘法的目标函数为:
式中: P为观测值的权矩阵。误差方程的法方程为:
法方程的解为:
1.2 稳健光束法平差
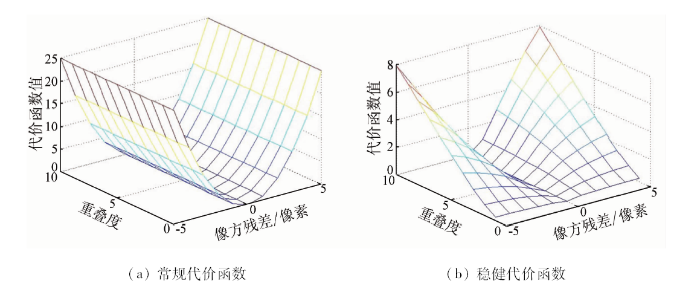
考虑到在影像匹配时,多度同名点具有更高的可靠性,因为特征点的重叠度越高,说明其稳定性较好,平差时可以给予更高的“信任”。所以需要一种能够顾及特征点重叠度的代价函数,以提高区域网平差的稳健性。本文采用了一种结合Cauchy理论和连接点重叠度的稳健代价函数,Cauchy代价函数和本文函数分别为:
式中: sj为第j个物方点的像方反投影误差; rj为其重叠度; μ和σ分别为测区中连接点重叠度的均值和方差。对于某一物方点的重叠度,通过除以均值和方差的和实现归一化,然后取平方得到的结果作为稳健代价函数的权重。较高的重叠度说明连接点在影像上出现的轨迹较长,可靠性更高,相应的观测值被赋予更高的权重,因此稳健光束法区域网平差的目标函数可以表示为:
式中: M3D为连接点的个数; NC为每个连接点的重叠度; Ri,ti,Ki分别为第i幅影像的外方位角元素矩阵、线元素矩阵和内方位元素矩阵; xji和Xj分别为特征点的像方和物方坐标观测值; g()为根据共线条件方程计算得到的像方坐标理论值。
图1
采用新的代价函数后,目标函数解算的过程变得复杂,本文利用开源库Ceres Solver对式(9)进行求解。Ceres Solver是由谷歌公司推出的解决非线性最小化问题的开源软件包,由于功能强大而稳定,在谷歌的多款产品中取得了成功的应用[17]。
1.3 精度评价
区域网平差精度的评价通常采用2种方式: 当有地面控制点数据时,采用平差优化后的内外方位元素前方交会得到物方坐标,与外业测量结果进行比较; 当没有地面控制点时,统计平差后连接点像方残差中误差。前者得到的精度是“外符合”精度,结果客观,说服力强,但依赖于外业控制点; 后者方便灵活,只需要在平差结束之后进行一次统计运算,得到的精度结果是“内符合”精度。
为了对稳健区域网平差结果的精度进行评价,需要相对应的技术方法。由于无人机作业时很多情况下无法布设地面控制点,特别是在沙漠、海岛礁等困难地区,所以要采用一种不依赖于地面控制点的精度评价方法。采用稳健代价函数后,虽然克服了粗差点对于平差结果的影响,但并没有进行粗差的定位与剔除,所以采用统计像方残差中误差的方式也不再合适。考虑到区域网平差起的作用是对影像的内外方位元素进行“精化”,所以从这个角度出发,利用平差后的内外方位元素计算基本矩阵F,根据基本矩阵的精度间接评价区域网平差的效果。
图2
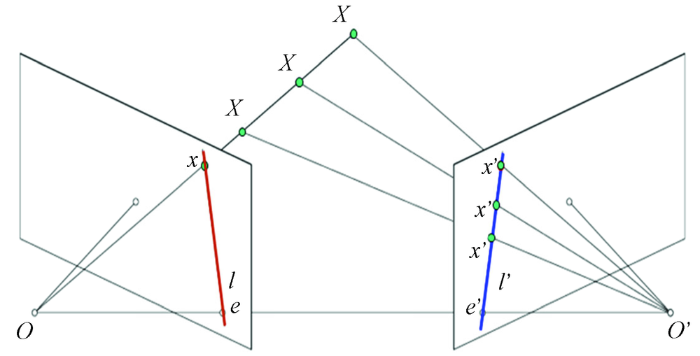
如果一个物方点在2幅影像中的齐次坐标分别为x和x',那么像点满足关系
影像匹配结束后利用同名点坐标计算基本矩阵,根据式(10),至少需要8对同名点才能计算F,当同名点数量更多时可以对F进行最小二乘估计。在区域网平差之后,也可利用2幅影像的内外方位元素直接求解F[19-20],即
式中: R1和R2分别为左像和右像的旋转矩阵; B[x]为摄影基线向量B的叉乘矩阵表示,即
式中BX,BY,BZ分别为B在各个方向上的分量。
采用了新的精度评价指标,就可以在区域网平差结束后,从测区中均匀选取一定数量的立体像对,利用平差前和平差后的内外方位元素分别求解基本矩阵。在立体像对左像上选择一定数量显著的特征点(例如地物角点、端点、交叉点等),分别利用2个基本矩阵计算核线,然后在右像上量测同名特征点到2个核线的距离,依据距离中误差大小来衡量平差前后外方位元素的精度。
2 实验与分析
实验共采用了4组不同区域的无人机影像,基本信息如表1。其中区域A,C,D数据利用固定翼无人机获取,区域B数据利用无人直升机获取,4组数据的航高在150~ 700 m范围内,数据种类较为丰富,比较具有代表性。
表1 实验数据基本情况
Tab.1
| 区域 | 影像数量/幅 | 平台 | 相机 | 像幅/像素 | 航摄时间 | 行政区划 | 航高/m | 地面分辨率/cm |
|---|---|---|---|---|---|---|---|---|
| A | 1 209 | 智能鸟无人机 | Canon EOS 5DS | 8 688×5 792 | 2015年10月 | 内蒙古自治区 | 700 | 10.0 |
| B | 186 | 无人直升机 | Phase One IQ180 | 10 328×7 760 | 2015年10月 | 河南省 | 500 | 5.0 |
| C | 563 | 天宝无人机 | SONY_α5100 | 6 000×4 000 | 2016年4月 | 河南省 | 150 | 4.0 |
| D | 433 | 天宝无人机 | SONY_α5100 | 6 000×4 000 | 2016年4月 | 河南省 | 150 | 4.0 |
实验时,首先分别用常规的光束法平差和稳健区域网平差方法处理4组影像; 然后分别向4组影像中添加5%,10%,15%,20%,25%的随机噪声(通过产生随机数的方式对影像上正确匹配的同名点坐标值添加噪声,均值3像素,方差2像素,服从高斯分布),验证所提出方法的有效性。
表2 数据处理结果
Tab.2
| 区 域 | 同名点数量 (物方/像方) | 原始数据 | 5% 噪声 | 10% 噪声 | 15% 噪声 | 20% 噪声 | 25% 噪声 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BA | RBA | BA | RBA | BA | RBA | BA | RBA | BA | RBA | BA | RBA | ||
| A | 68 238/141 592 | 1.03 | 0.71 | 2.32 | 0.76 | 4.68 | 0.81 | × | 1.33 | × | 1.50 | × | 2.84 |
| B | 532 324/2 309 275 | 0.99 | 0.58 | 1.21 | 0.66 | 3.25 | 0.72 | × | 1.29 | × | 2.01 | × | × |
| C | 206 543/454 724 | 1.23 | 0.72 | 1.56 | 0.84 | 6.22 | 0.88 | × | 1.56 | × | 2.34 | × | 2.99 |
| D | 330 087/742 503 | 1.35 | 0.78 | 3.11 | 0.77 | 5.88 | 0.98 | × | 1.07 | × | 1.12 | × | × |
通过分析表 2可以得出以下结论: ①常规的光束法平差对于噪声比较敏感,当数据中噪声达到5%时,平差精度显著下降,当噪声达到10%时,平差结果精度超出可以接受的范围,噪声比例达到15%以上时,平差不收敛,解算失败; ②本文所设计的代价函数对于噪声具有一定的稳健性,当噪声比例低于10%时,平差结果几乎不受影响,当噪声比例达到20%时,精度变差,但仍然可以解算,当噪声比例大于20%时,不一定能够解算出结果。
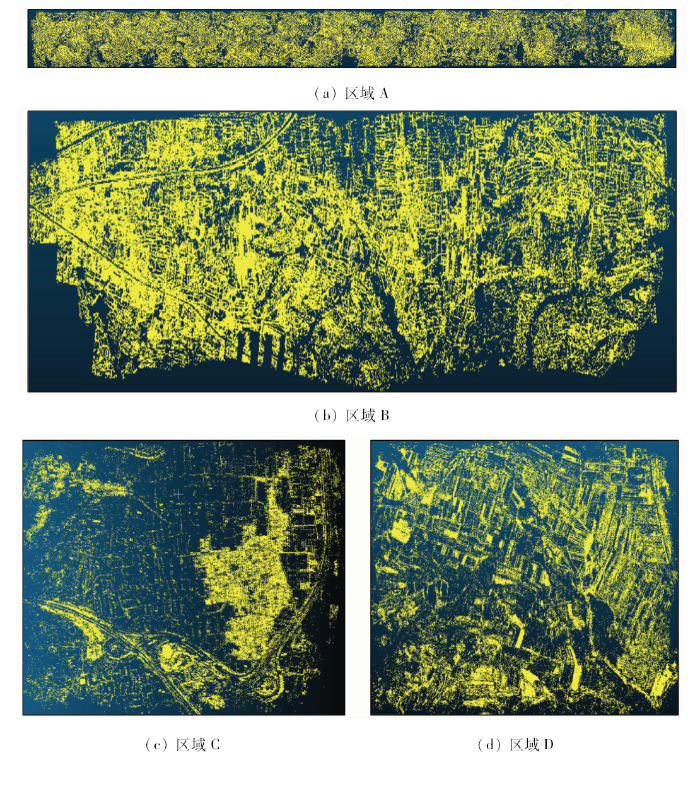
实验结果表明,稳健代价函数能够有效克服噪声的影响,在无人机数据处理中可以提升区域网平差的稳健性,具有一定的实用价值。采用稳健区域网平差得到的稀疏点云如图3所示,点云的分布情况可以间接说明平差结果的质量,通过道路、建筑物的几何轮廓的比例协调性和连续性可以看出鲁棒区域网平差得到的加密点质量较好。
图3
3 结论
1)本文采用了一种顾及观测值可靠性的稳健平差方法,根据特征点的重叠度和残差大小自适应调整代价函数,从而克服误匹配点对平差结果的干扰。与稳健代价函数相对应,设计了一种区域网平差精度评价方法。
2)利用4组无人机影像进行实验,结果表明本文方法稳健性较好,能够在误匹配点比较多的情况下取得较好的结果,具有一定的实用价值。
3)本文方法可以作为传统光束法平差中粗差剔除方法的重要补充,在影像同名点匹配结果中含有较多噪声的情况下使用。
参考文献
Unmanned aerial systems for photogrammetry and remote sensing:A review
[J].
基于随机抽样一致算法的误匹配标志点校正方法
[J].
Mismatching marked points correction method based on random sample consensus algorithm
[J].
图像匹配中误匹配点检测技术综述
[J].
Review of false matching points detection methods for image matching
[J].
浅谈测量平差到空间数据分析的可靠性理论延伸
[J].
Extension of reliability theory of surveying adjustment into spatial data analytics
[J].
Photogrammetry
[M].
Student’s trobust bundle adjustment algorithm
[C]//
Methods for Non-Linear Least Squares Problems
[M].
Adaptive structure from motion with a contrario model estimation
[C]//
无人机影像定位优化技术研究
[D].
Research on optimization technology of UAV images positioning
[D].
Using spatial order to boost the elimination of incorrect feature matches
[C]//
On the use of INS to improve feature matching
[J].
An accelerated image matching technique for UAV orthoimage registration
[J].
基于基础矩阵的倾斜航摄影像相对定向方法
[J].
Oblique aerial image relative orientation based on fundamental matrix
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}