0 引言
地下采矿活动会破坏开采工作面上覆岩层的原始应力平衡,从而导致矿区地表发生水平移动和下沉,不仅会对地面建筑和生产设施造成破坏,还可能诱发地质灾害,给矿区居民的生产和生活留下安全隐患[1 ] 。地下开采导致的地表沉降不仅与煤层的水文地质条件有关,而且也与开采方法、开采速度等密切相关。利用矿山开采沉降规律对地下开采活动引起的后续地表沉降进行有效预测,是评估矿山开采风险并进一步采取防护措施的关键。
以往基于水准或GPS测量的沉降仅可对少量离散点进行沉降预测,而合成孔径雷达干涉测量(synthetic aperture Radar interferometry,InSAR)技术的发展和应用为大范围的沉降预测提供了数据基础。InSAR技术凭借其大范围监测、高空间分辨率、穿云透雾等优点被广泛应用于地表形变的监测中[2 ] 。矿区地表通常有植被覆盖,并且容易发生大梯度形变,这使得矿区容易发生失相干现象[3 ] 。而小基线集干涉测量技术(small baseline subset-InSAR,SBAS-InSAR)作为一种常用的InSAR形变监测技术,可以有效减弱时空失相干和大气效应的影响,在矿区沉降监测中得到了广泛的研究与应用[4 ⇓ ⇓ -7 ] 。
矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] 。描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等。其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合。张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度。杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测。但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件。在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用。
本文对使用Logistic时间函数模型进行矿区沉降预测中的可用条件进行了分析和模拟实验,并提出了一种基于小基线集InSAR(SBAS-InSAR)技术和Logistic时间函数模型的矿区沉降动态预测方法。首先,采用SBAS-InSAR技术对矿山开采引起的沉降进行监测,获取矿区沉降时间序列; 然后,以时序沉降数据作为拟合数据,采用信赖域算法逐像元计算Logistic模型参数,并根据Logistic模型的可用条件判断出可对后续沉降进行预测的像元范围; 最后,根据Logistic模型计算对可预测范围内的所有像元的后续沉降进行预测。
1 方法与原理
1.1 Logistics模型
选择Logistic模型以确定矿区沉降动态预测中的可预测条件和预测矿区沉降,这是因为其对于矿区沉降具有良好的拟合精度,且具有最大加速度点、最大速度点和最小加速度点3个特征点,利于沉降阶段的划分。Logistic模型是经典的“S”型增长曲线,其公式为:
(1) W(t)= W 0 1 + a e - b t
式中: W (t )为某一点t 时刻的下沉值; W 0 为该点最大下沉值; a 和b 为形状参数; 待求参数为W 0 ,a 和b 。对式(1)分别求一阶导数和二阶导数,可得到Logistic模型下沉速度和下沉加速度的表达式,分别为:
(2) v(t)= d W ( t ) d t a b W 0 e b t ( a e - b t + 1 ) 2
(3) a(t)= d 2 W ( t ) d t 2 2 a 2 b 2 W 0 e 2 b t ( a e - b t + 1 ) 3 a b 2 W 0 e b t ( a e - b t + 1 ) 2
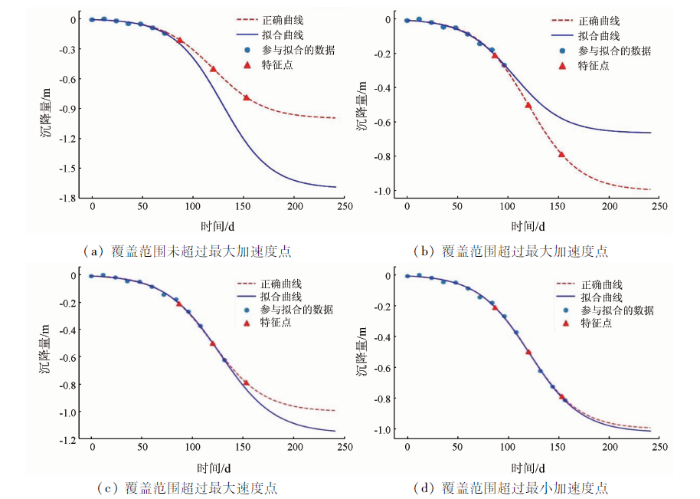
Logistic模型具有3个特征点,分别为最大加速度点、最大速度点和最小加速度点。根据这3个特征点设置了拟合数据对沉降过程的不同覆盖程度,并探究其对Logistic模型拟合精度的影响。假定一个W 0 ,a 和b 参数分别为-1 m,120和0.04的Logistic模型,时间范围设置为0~240 d,每12 d获取一个沉降值得到该Logistic模型下的沉降时间序列。为了使模拟的数据符合实际情况,在沉降时间序列中加入了0.02 m的正态分布随机误差。根据拟合数据对沉降过程的不同覆盖程度设置了4组模拟实验,采用信赖域算法进行拟合得到Logistic曲线,如图1 所示。图上3个红色三角形自左到右分别代表最大加速度点、最大速度点和最小加速度点。
图1
图1
参与拟合数据对沉降过程的不同覆盖范围对拟合正确性的影响
Fig.1
The influence of different coverage of the fitting data on the subsidence process on the fitting accuracy
从图1 中可以看出,随着拟合数据覆盖范围的增加,拟合曲线越来越逼近正确曲线。直到拟合数据覆盖范围超过最右边特征点(最小加速度点)时,拟合曲线才非常接近正确曲线。因此,将拟合数据覆盖范围是否超过最小加速度点作为Logistic模型的可用条件,并根据该可用条件逐像元进行判断得到可对后续沉降进行预测的范围。
1.2 SBAS-InSAR矿区沉降监测
采用SBAS-InSAR对矿山开采引起的沉降进行监测,SBAS-InSAR可以有效减弱常规InSAR方法中易受大气延迟误差干扰、时空失相干等问题。假设有N +1幅覆盖研究区域的SAR影像时,选取其中一幅作为超级主影像,将其余N 幅SAR影像都配准到超级主影像上,根据小基线原则和矿区形变速度快、形变量级大的特点设定时空基线阈值进行基线组合,得到M 个干涉对。M 满足:
(4) (N+1)/2<M<N(N+1)/2,
其中任一干涉对主影像和从影像获取时间分别设为t A 和t B (t B > t A ),对干涉对进行干涉、去平地效应和去地形相位后,得到的第j 幅干涉图上高相干点(x ,y )上的相位值可以表示为[18 ] :
(5) δ φ j ( x , y ) = φ B ( x , y ) - φ A ( x , y ) ≈ 4 π λ [ d ( t B , x , y ) - d ( t A , x , y ) ] + Δ φ j t o p o ( x , y ) + Δ φ j o r b ( x , y ) + Δ φ j a t m ( x , y ) + Δ φ j n o i s e ( x , y )
式中: λ 为波长; d (tB ,x ,y )和d (tA ,x ,y )为相对于d (t 0 ,x ,y )=0时的雷达视线方向的累积形变量; Δ φ j t o p o ( x ,y ),Δ φ j a t m ( x ,y ),Δ φ j o r b ( x ,y )和Δ φ j n o i s e ( x ,y )分别表示残余地形、轨道信息不精确、大气延迟和噪声导致的相位误差,去除这些误差相位后,式(5)可简化为:
(6) δφj (x,y)≈ 4 π λ B ,x,y)-d(tA ,x,y)],
(7) d(tB ,x,y)-d(tA ,x,y)=vi (tB -tA ),
式中: vi 为tA 至tB 时间段内雷达视线方向的平均形变速率。将式(6)和式(7)转化为矩阵形式为:
(8) BV=δφ,
式中: B 为参数矩阵; V 为平均形变速率矩阵; δφ 为相位矩阵。采用最小二乘法和奇异值分解法对式(8)求解,得到各时间段内平均形变速率的最小范数解,并对其进行积分得到视线(line of sight,LOS)方向的时间序列形变量[19 ] 。
利用式(9)将LOS方向形变转换为沉降值,公式为:
(9) W=dLOS /cosθ,
式中: W 为沉降值; d LOS 为LOS方向形变; θ 为入射角。
1.3 信赖域算法求解Logistic模型参数
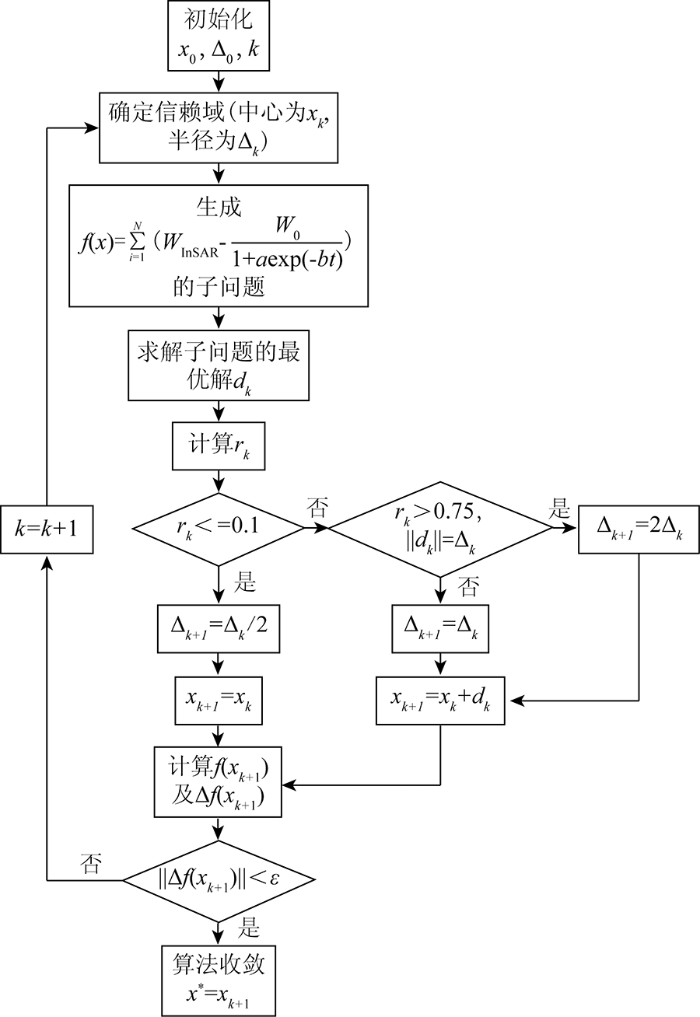
采用信赖域算法逐像元将SBAS-InSAR监测的时序沉降进行Logistic模型拟合,计算其最优Logistic模型参数,即求解式(10):
(10) minf(x)= ∑ i = 1 N InSAR - W 0 1 + a e x p ( - b t )
设xk 为第k 次迭代点,f k f (xk ), gk = g (xk ) = ∇ f (xk ),Bk 为∇ 2 f (xk )的第k 次近似,则第k 次迭代步信赖域二次模型子问题如式(11)所示[20 ] :
(11) m i n φ k ( d ) = f k + g T k d + 1 2 d T B k d s . t . | | d | | ≤ Δ k
式中: Δk dk ,通过式(12)反映二次函数模型与目标函数之间的近似程度,公式为:
(12) rk = f ( x k ) - f ( x k + d k ) f ( x k ) - φ k ( d k )
若r k x k dk 不能作为下一个迭代点,此时需要缩小信赖域半径; 若r k rk 离1 较远,则需要缩小信赖域半径。不断迭代直至得到收敛解,流程图如图2 所示。
图2
图2
信赖域算法计算Logistic模型参数流程图
Fig.2
Flow chart of calculating Logistic model parameters by trust region algorithm
1.4 矿区沉降动态预测方法
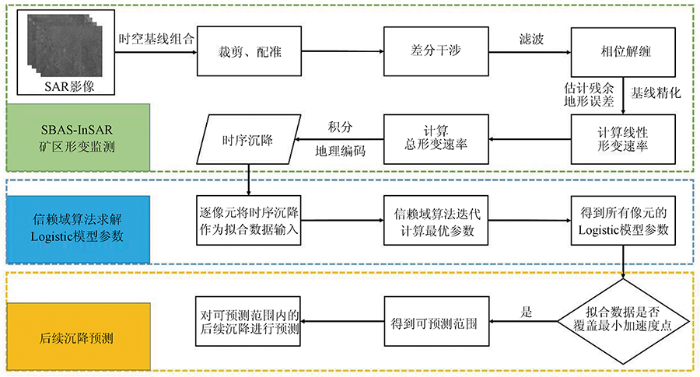
本预测方法首先采用SBAS-InSAR对开采沉降进行监测,获取沉降时间序列; 然后以沉降时间序列作为拟合数据,采用信赖域算法逐像元进行Logistic模型求参,并根据可预测条件判断可预测范围; 最后利用Logistic模型对可预测范围内的像元进行沉降预测。流程图如图3 所示。
图3
图3
矿区沉降动态预测方法流程图
Fig.3
Flow chart of subsidence dynamic prediction method in mining area
2 矿区沉降预测实验与结果
2.1 研究区与数据源
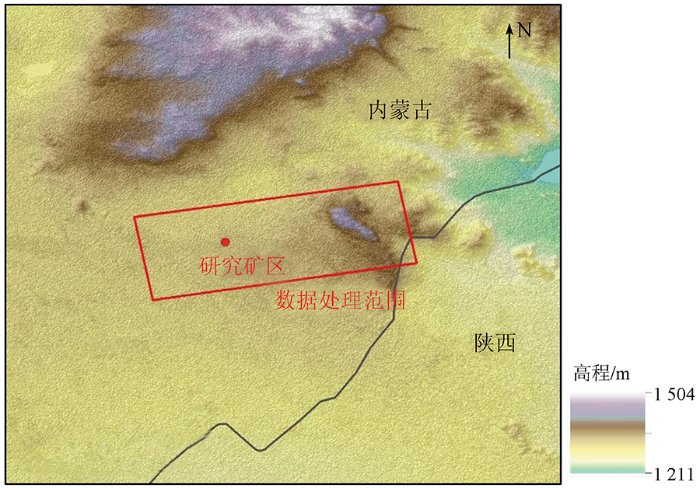
所选研究矿区为内蒙古某矿区,位于鄂尔多斯市东南部,地处毛乌素沙漠的东北边缘,与陕西省榆林市毗邻,如图4 所示。研究矿区表面植被覆盖率较低,受时间去相干影响较小。所处位置地势较为平坦,平均海拔为1 310 m。利用40景IW模式、VV极化的Sentinel-1A影像进行SBAS-InSAR处理,时间跨度为2017年9月20日—2019年2月18日,影像参数如表1 所示。其中2017年9月20日—2018年11月02日的时序沉降用于作为拟合数据计算Logistic模型参数,并分别对2018年12月08日和2019年02月18日的累积沉降进行预测,采用对应日期的InSAR监测累积沉降对预测结果进行了验证。相邻影像时间间隔大部分是12 d,少量为24 d,小的时间间隔可以最小化大部分去相干源的影响。采用30 m分辨率的航天飞机雷达地形测绘使命(Shuttle Radar Topography Mission,SRTM)数据用于模拟和去除地形相位。
图4
图4
研究矿区位置
Fig.4
Location of the study mining area
2.2 SBAS-InSAR监测
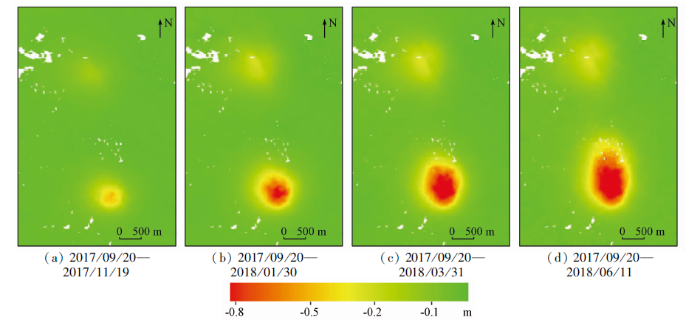
根据小基线集的原则和矿区大梯度形变的特点,设置空间基线和时间基线的阈值分别为150 m和36 d。经过配准、差分干涉、滤波、相位解缠、基线精化、估算线性形变速率、去除大气延迟误差、估算最终形变速率、相位转形变和地理编码,并将形变转到垂直方向后,得到了该矿区2017年9月20日—2019年2月18日的39幅时序沉降图,部分如图5 所示。
图5-1
图5-1
时序沉降图
Fig.5-1
Time series subsidence
图5-2
图5-2
时序沉降图
Fig.5-2
Time series subsidence
图5 (h)中的A—D这4个点于下节中展示Logistic模型拟合情况。
2.3 Logistic模型拟合
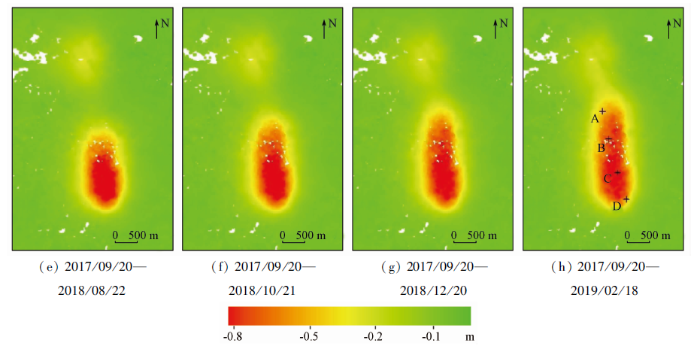
以SBAS-InSAR处理得到的2017年9月20日—2018年11月02日的时序沉降数据作为拟合数据,对最终沉降大于0.05 m的像元逐像元采用信赖域算法计算Logistic模型参数。图6 展示图5 (h)中的A,B,C,D这4个点的Logistic模型拟合情况。
图6
图6
Logistic模型拟合情况
Fig.6
Logistic model fitting situation
2.4 沉降预测结果
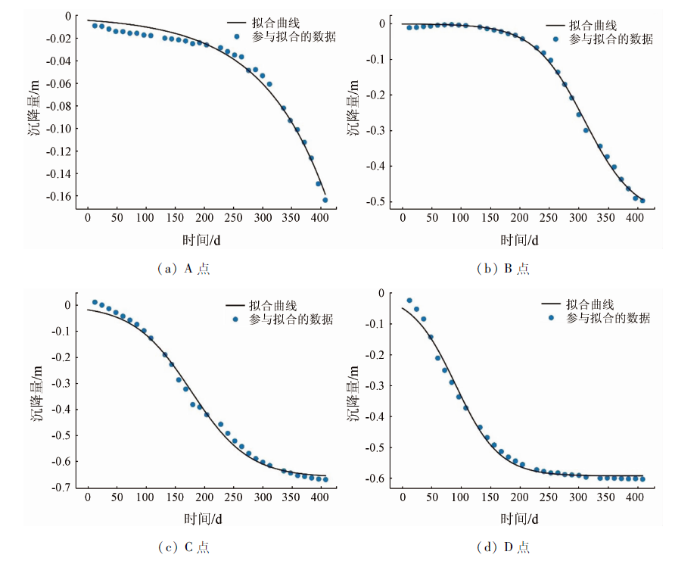
根据拟合得到的Logistic模型的参数,以参与拟合数据的覆盖范围是否超过最小加速度点作为判断依据逐像元进行判断,得到可预测范围。分别对2017年9月20日—2018年12月08日和2019年02月18日的累积沉降进行预测,如图7 所示。
图7
图7
预测沉降图
Fig.7
Prediction subsidence diagram
2.5 预测精度验证
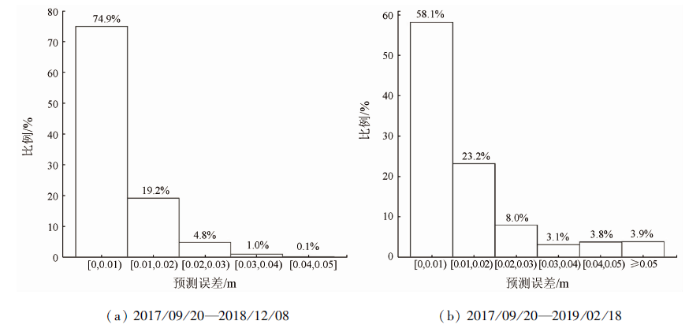
采用SBAS-InSAR获得的2017年9月20日—2018年12月08日和2019年02月18日的累积沉降对预测结果进行验证。将InSAR监测值和预测值作一致性验证图,如图8 所示,可以看出大部分点分布在y =x 附近,两者一致性较高。可预测范围内全部像元的预测沉降值与InSAR监测沉降值的RMSE分别为0.010 1 m和0.023 6 m。统计预测误差作柱状图如图9 所示,预测误差小于0.03 m的比例分别达到98.9%和89.3%,表明该动态预测模型预测精度较高。
图8
图8
一致性验证图
Fig.8
Consistency verification diagram
图9
图9
预测误差统计柱状图
Fig.9
Statistical bar graph of prediction error
2.6 预测精度影响因素分析
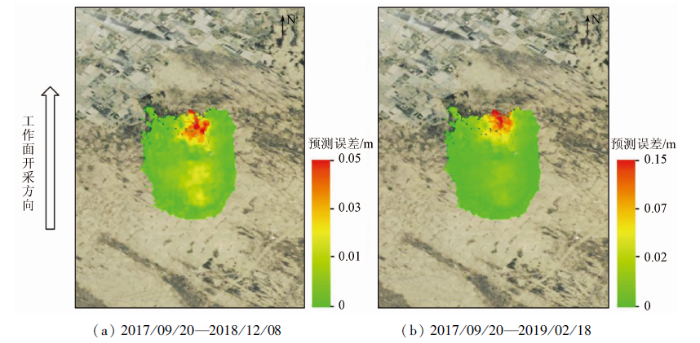
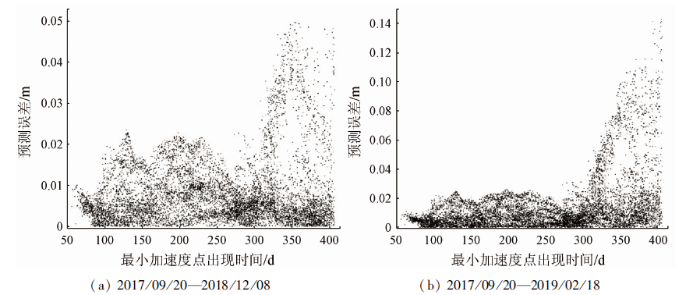
预测误差的空间分布如图10 所示,从图中可以看出: 垂直于工作面开采方向,预测误差较大的像元基本处于沉降盆地的中间位置,因为沉降盆地中间位置下沉量大、下沉速度快,容易导致大的预测误差; 沿着工作面开采方向,预测误差较大的像元大部分处于开采方向末端,分析原因是开采方向末端像元拟合数据对最小加速度点后下沉过程的覆盖程度较低。将最小加速度点出现时间作为x 轴,预测误差作为y 轴,绘制散点图,如图11 所示。从图11 可以看出,最小加速度点出现时间越晚,出现较大预测误差的概率也随之增加。因为拟合数据的时间范围是一个定值,最小加速度点出现时间越晚,最小加速度点之后的拟合数据就越少,对最小加速度点后下沉过程的覆盖程度就会越低,会对后续沉降的预测精度产生影响。
图10
图10
预测误差空间分布
Fig.10
Spatial distribution of prediction error
图11
图11
最小加速度点出现时间与预测误差之间的关系
Fig.11
Relationship between the occurrence time of minimum acceleration point and prediction error
3 结论
本文对Logistic模型在矿区沉降动态预测中的可用条件进行分析与模拟实验,并基于SBAS-InSAR技术和Logistic模型提出了一种新的矿区沉降动态预测方法。以内蒙古某矿区为实验区,利用2017年9月20日—2019年2月18日的40景Sentinel-1A数据进行了矿区开采沉降预测实验,结果显示36 d后和108 d后预测结果的RMSE分别为0.010 1 m和0.023 6 m,预测误差小于0.03 m的比例分别达到98.9%和89.3%,表明该预测方法精度较高。该方法具有一定的实用性,对评估矿山开采风险、指导矿区开采规划具有一定的理论借鉴价值和实际应用意义。
参考文献
View Option
[1]
何国清 , 杨伦 , 凌赓娣 , 等 . 矿山开采沉陷学 [M]. 徐州 : 中国矿业大学出版社 , 1991 .
[本文引用: 1]
He G Q Yang L Ling G D et al. Mining subsidence [M]. Xuzhou : China University of Mining and Technology Press , 1991 .
[本文引用: 1]
[2]
朱建军 , 李志伟 , 胡俊 . InSAR变形监测方法与研究进展
[J]. 测绘学报 , 2017 , 46 (10 ):1717 -1733 .
[本文引用: 1]
Zhu J J Li Z W Hu J Research progress and methods of InSAR for deformation monitoring
[J]. Journal of Geodesy and Geoinformation Science , 2017 , 46 (10 ):1717 -1733 .
[本文引用: 1]
[3]
[本文引用: 1]
Ge D Q Wang Y Fan J H et al. A study of surface deformation monitoring using differential SAR interferometry technique and an analysis of its key problems
[J]. Remote Sensing for Land and Resources , 2007 , 19 (4 ):14 -22 .doi: 10.6046/gtzyyg.2007.04.04 .
[本文引用: 1]
[4]
[本文引用: 1]
Liu Y L Zhang Q Huang H J et al. Monitoring and analyzing large scale land subsidence over the mining area using small baseline subset InSAR
[J]. Remote Sensing for Land and Resources , 2017 , 29 (2 ):144 -151 .doi: 10.6046/gtzyyg.2017.02.21 .
[本文引用: 1]
[5]
Chen Y Tong Y Tan K Coal mining deformation monitoring using SBAS-InSAR and offset tracking:A case study of Yu County,China
[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing , 2020 (13 ):6077 -6087 .
[本文引用: 1]
[6]
[本文引用: 1]
Liu Z M Li Y S Zhang J F et al. An analysis of surface deformation in the Changzhi mining area using small baseline InSAR
[J]. Remote Sensing for Land and Resources , 2014 , 26 (3 ):37 -42 .doi: 10.6046/gtzyyg.2014.03.06 .
[本文引用: 1]
[7]
Yuan M Li M Liu H et al. Subsidence monitoring base on SBAS-InSAR and slope stability analysis method for damage analysis in mountainous mining subsidence regions
[J]. Remote Sensing , 2021 , 13 (16 ):3107 .
DOI:10.3390/rs13163107
URL
[本文引用: 1]
[8]
Knothe S Time influence on a formation of a subsidence surface
[J]. Archiwum Gornicwai Huticwa Krakow , 1952 , 1 (1 ):1 -3 .
[本文引用: 1]
[9]
张兵 , 崔希民 , 赵玉玲 , 等 . 优化分段Knothe时间函数求参方法
[J]. 煤炭学报 , 2018 , 43 (12 ):3379 -3386 .
[本文引用: 1]
Zhang B Cui X M Zhao Y L et al. Parameter calculation method for optimized segmented Knothe time function
[J]. Journal of China Coal Society , 2018 , 43 (12 ):3379 -3386 .
[本文引用: 1]
[10]
万芳芳 , 罗文柯 , 李树清 , 等 . 厚松散层矿区地表动态移动预计研究
[J]. 煤炭工程 , 2018 , 50 (4 ):105 -109 .
[本文引用: 1]
Wan F F Luo W K Li S Q et al. Study on prediction of surface dynamic movement in thick unconsolidated mining area
[J]. Coal Engineering , 2018 , 50 (4 ):105 -109 .
[本文引用: 1]
[11]
高建 , 陈炳乾 , 冯遵德 . 一种基于TerraSAR数据的矿区InSAR最大可检测动态形变梯度模型
[J]. 大地测量与地球动力学 , 2020 , 40 (11 ):1175 -1181 .
[本文引用: 1]
Gao J Chen B Q Feng Z D A maximum detectable dynamic deformation gradient model of InSAR based on TerraSAR data
[J]. Journal of Geodesy and Geodynamics , 2020 , 40 (11 ):1175 -1181 .
[本文引用: 1]
[12]
王小华 , 胡海峰 , 廉旭刚 . 基于Weibull时间序列函数与负指数法的动态沉陷预计
[J]. 金属矿山 , 2015 (8 ):158 -162 .
[本文引用: 1]
Wang X H Hu H F Lian X G Dynamic subsidence prediction method based on negative exponential method and Weibull time sequence function
[J]. Metal Mine , 2015 (8 ):158 -162 .
[本文引用: 1]
[13]
白斌 , 张文泉 . 厚松散层开采松散层沉降时间序列模型研究
[J]. 煤炭技术 , 2018 , 37 (9 ):176 -177 .
[本文引用: 1]
Bai B Zhang W Q Study on time series model of loose layer settlement in thick loose layer mining
[J]. Coal Technology , 2018 , 37 (9 ):176 -177 .
[本文引用: 1]
[14]
张兵 , 崔希民 , 胡青峰 . 开采沉陷动态预计的正态分布时间函数模型研究
[J]. 煤炭科学技术 , 2016 , 44 (4 ):140 -145 ,174.
[本文引用: 1]
Zhang B Cui X M Hu Q F Study on normal distributed time function model to dynamically predict mining subsidence
[J]. Coal Science and Technology , 2016 , 44 (4 ):140 -145 ,174.
[本文引用: 1]
[15]
张凯 , 胡海峰 , 廉旭刚 , 等 . 地表动态沉陷预测正态时间函数模型优化研究
[J]. 煤炭科学技术 , 2019 , 47 (9 ):235 -240 .
[本文引用: 1]
Zhang K Hu H F Lian X G et al. Optimization of surface dynamic subsidence prediction normal time function model
[J]. Coal Science and Technology , 2019 , 47 (9 ):235 -240 .
[本文引用: 1]
[16]
张文志 , 邹友峰 , 任筱芳 . Logistic模型在开采沉陷单点预测中的研究
[J]. 采矿与安全工程学报 , 2009 , 26 (4 ):486 -489 .
[本文引用: 2]
ZHANG W Z Zou Y F Ren X F Research on Logistic model in forecasting subsidence single—point during mining
[J]. Journal of Mining and Safety Engineering , 2009 , 26 (4 ):486 -489 .
[本文引用: 2]
[17]
杨泽发 , 易辉伟 , 朱建军 , 等 . 基于InSAR时序形变的矿区全盆地沉降时空演化规律分析
[J]. 中国有色金属学报 , 2016 , 26 (7 ):1515 -1522 .
[本文引用: 2]
Yang Z F Yi H W Zhu J J et al. Spatio-temporal evolution law analysis of whole mining subsidence basin based on InSAR-derived time-series deformation
[J]. The Chinese Journal of Nonferrous Metals , 2016 , 26 (7 ):1515 -1522 .
[本文引用: 2]
[18]
尹宏杰 , 朱建军 , 李志伟 , 等 . 基于SBAS的矿区形变监测研究
[J]. 测绘学报 , 2011 , 40 (1 ):52 -58 .
[本文引用: 1]
Yin H J Zhu J J Li Z W et al. Ground subsidence monitoring in mining area using DInSAR SBAS algorithm
[J]. Acta Geodaetica et Cartographica Sinica , 2011 , 40 (1 ):52 -58 .
[本文引用: 1]
[19]
姜兆英 . 短基线集InSAR形变模型的不适定问题解算方法研究 [D]. 青岛 : 山东科技大学 , 2018 .
[本文引用: 1]
Jiang Z Y Study on the solving methods of the ill-Posed problems of the SBAS InSAR deformation model [D]. Qingdao : Shandong University of Science and Technology , 2018 .
[本文引用: 1]
[20]
崔兆诚 . 无约束优化问题改进的信赖域方法 [D]. 哈尔滨 : 哈尔滨工业大学 , 2011 .
[本文引用: 1]
Cui Z C The improved trust region methods for unconstrained optimization problems [D]. Harbin : Harbin Institute of Technology , 2011 .
[本文引用: 1]
1
1991
... 地下采矿活动会破坏开采工作面上覆岩层的原始应力平衡,从而导致矿区地表发生水平移动和下沉,不仅会对地面建筑和生产设施造成破坏,还可能诱发地质灾害,给矿区居民的生产和生活留下安全隐患[1 ] .地下开采导致的地表沉降不仅与煤层的水文地质条件有关,而且也与开采方法、开采速度等密切相关.利用矿山开采沉降规律对地下开采活动引起的后续地表沉降进行有效预测,是评估矿山开采风险并进一步采取防护措施的关键. ...
1
1991
... 地下采矿活动会破坏开采工作面上覆岩层的原始应力平衡,从而导致矿区地表发生水平移动和下沉,不仅会对地面建筑和生产设施造成破坏,还可能诱发地质灾害,给矿区居民的生产和生活留下安全隐患[1 ] .地下开采导致的地表沉降不仅与煤层的水文地质条件有关,而且也与开采方法、开采速度等密切相关.利用矿山开采沉降规律对地下开采活动引起的后续地表沉降进行有效预测,是评估矿山开采风险并进一步采取防护措施的关键. ...
InSAR变形监测方法与研究进展
1
2017
... 以往基于水准或GPS测量的沉降仅可对少量离散点进行沉降预测,而合成孔径雷达干涉测量(synthetic aperture Radar interferometry,InSAR)技术的发展和应用为大范围的沉降预测提供了数据基础.InSAR技术凭借其大范围监测、高空间分辨率、穿云透雾等优点被广泛应用于地表形变的监测中[2 ] .矿区地表通常有植被覆盖,并且容易发生大梯度形变,这使得矿区容易发生失相干现象[3 ] .而小基线集干涉测量技术(small baseline subset-InSAR,SBAS-InSAR)作为一种常用的InSAR形变监测技术,可以有效减弱时空失相干和大气效应的影响,在矿区沉降监测中得到了广泛的研究与应用[4 ⇓ ⇓ -7 ] . ...
InSAR变形监测方法与研究进展
1
2017
... 以往基于水准或GPS测量的沉降仅可对少量离散点进行沉降预测,而合成孔径雷达干涉测量(synthetic aperture Radar interferometry,InSAR)技术的发展和应用为大范围的沉降预测提供了数据基础.InSAR技术凭借其大范围监测、高空间分辨率、穿云透雾等优点被广泛应用于地表形变的监测中[2 ] .矿区地表通常有植被覆盖,并且容易发生大梯度形变,这使得矿区容易发生失相干现象[3 ] .而小基线集干涉测量技术(small baseline subset-InSAR,SBAS-InSAR)作为一种常用的InSAR形变监测技术,可以有效减弱时空失相干和大气效应的影响,在矿区沉降监测中得到了广泛的研究与应用[4 ⇓ ⇓ -7 ] . ...
地表形变D-InSAR监测方法及关键问题分析
1
2007
... 以往基于水准或GPS测量的沉降仅可对少量离散点进行沉降预测,而合成孔径雷达干涉测量(synthetic aperture Radar interferometry,InSAR)技术的发展和应用为大范围的沉降预测提供了数据基础.InSAR技术凭借其大范围监测、高空间分辨率、穿云透雾等优点被广泛应用于地表形变的监测中[2 ] .矿区地表通常有植被覆盖,并且容易发生大梯度形变,这使得矿区容易发生失相干现象[3 ] .而小基线集干涉测量技术(small baseline subset-InSAR,SBAS-InSAR)作为一种常用的InSAR形变监测技术,可以有效减弱时空失相干和大气效应的影响,在矿区沉降监测中得到了广泛的研究与应用[4 ⇓ ⇓ -7 ] . ...
地表形变D-InSAR监测方法及关键问题分析
1
2007
... 以往基于水准或GPS测量的沉降仅可对少量离散点进行沉降预测,而合成孔径雷达干涉测量(synthetic aperture Radar interferometry,InSAR)技术的发展和应用为大范围的沉降预测提供了数据基础.InSAR技术凭借其大范围监测、高空间分辨率、穿云透雾等优点被广泛应用于地表形变的监测中[2 ] .矿区地表通常有植被覆盖,并且容易发生大梯度形变,这使得矿区容易发生失相干现象[3 ] .而小基线集干涉测量技术(small baseline subset-InSAR,SBAS-InSAR)作为一种常用的InSAR形变监测技术,可以有效减弱时空失相干和大气效应的影响,在矿区沉降监测中得到了广泛的研究与应用[4 ⇓ ⇓ -7 ] . ...
矿区地表大量级沉陷形变短基线集InSAR监测分析
1
2017
... 以往基于水准或GPS测量的沉降仅可对少量离散点进行沉降预测,而合成孔径雷达干涉测量(synthetic aperture Radar interferometry,InSAR)技术的发展和应用为大范围的沉降预测提供了数据基础.InSAR技术凭借其大范围监测、高空间分辨率、穿云透雾等优点被广泛应用于地表形变的监测中[2 ] .矿区地表通常有植被覆盖,并且容易发生大梯度形变,这使得矿区容易发生失相干现象[3 ] .而小基线集干涉测量技术(small baseline subset-InSAR,SBAS-InSAR)作为一种常用的InSAR形变监测技术,可以有效减弱时空失相干和大气效应的影响,在矿区沉降监测中得到了广泛的研究与应用[4 ⇓ ⇓ -7 ] . ...
矿区地表大量级沉陷形变短基线集InSAR监测分析
1
2017
... 以往基于水准或GPS测量的沉降仅可对少量离散点进行沉降预测,而合成孔径雷达干涉测量(synthetic aperture Radar interferometry,InSAR)技术的发展和应用为大范围的沉降预测提供了数据基础.InSAR技术凭借其大范围监测、高空间分辨率、穿云透雾等优点被广泛应用于地表形变的监测中[2 ] .矿区地表通常有植被覆盖,并且容易发生大梯度形变,这使得矿区容易发生失相干现象[3 ] .而小基线集干涉测量技术(small baseline subset-InSAR,SBAS-InSAR)作为一种常用的InSAR形变监测技术,可以有效减弱时空失相干和大气效应的影响,在矿区沉降监测中得到了广泛的研究与应用[4 ⇓ ⇓ -7 ] . ...
Coal mining deformation monitoring using SBAS-InSAR and offset tracking:A case study of Yu County,China
1
2020
... 以往基于水准或GPS测量的沉降仅可对少量离散点进行沉降预测,而合成孔径雷达干涉测量(synthetic aperture Radar interferometry,InSAR)技术的发展和应用为大范围的沉降预测提供了数据基础.InSAR技术凭借其大范围监测、高空间分辨率、穿云透雾等优点被广泛应用于地表形变的监测中[2 ] .矿区地表通常有植被覆盖,并且容易发生大梯度形变,这使得矿区容易发生失相干现象[3 ] .而小基线集干涉测量技术(small baseline subset-InSAR,SBAS-InSAR)作为一种常用的InSAR形变监测技术,可以有效减弱时空失相干和大气效应的影响,在矿区沉降监测中得到了广泛的研究与应用[4 ⇓ ⇓ -7 ] . ...
基于SBAS-InSAR的长治矿区地表形变监测
1
2014
... 以往基于水准或GPS测量的沉降仅可对少量离散点进行沉降预测,而合成孔径雷达干涉测量(synthetic aperture Radar interferometry,InSAR)技术的发展和应用为大范围的沉降预测提供了数据基础.InSAR技术凭借其大范围监测、高空间分辨率、穿云透雾等优点被广泛应用于地表形变的监测中[2 ] .矿区地表通常有植被覆盖,并且容易发生大梯度形变,这使得矿区容易发生失相干现象[3 ] .而小基线集干涉测量技术(small baseline subset-InSAR,SBAS-InSAR)作为一种常用的InSAR形变监测技术,可以有效减弱时空失相干和大气效应的影响,在矿区沉降监测中得到了广泛的研究与应用[4 ⇓ ⇓ -7 ] . ...
基于SBAS-InSAR的长治矿区地表形变监测
1
2014
... 以往基于水准或GPS测量的沉降仅可对少量离散点进行沉降预测,而合成孔径雷达干涉测量(synthetic aperture Radar interferometry,InSAR)技术的发展和应用为大范围的沉降预测提供了数据基础.InSAR技术凭借其大范围监测、高空间分辨率、穿云透雾等优点被广泛应用于地表形变的监测中[2 ] .矿区地表通常有植被覆盖,并且容易发生大梯度形变,这使得矿区容易发生失相干现象[3 ] .而小基线集干涉测量技术(small baseline subset-InSAR,SBAS-InSAR)作为一种常用的InSAR形变监测技术,可以有效减弱时空失相干和大气效应的影响,在矿区沉降监测中得到了广泛的研究与应用[4 ⇓ ⇓ -7 ] . ...
Subsidence monitoring base on SBAS-InSAR and slope stability analysis method for damage analysis in mountainous mining subsidence regions
1
2021
... 以往基于水准或GPS测量的沉降仅可对少量离散点进行沉降预测,而合成孔径雷达干涉测量(synthetic aperture Radar interferometry,InSAR)技术的发展和应用为大范围的沉降预测提供了数据基础.InSAR技术凭借其大范围监测、高空间分辨率、穿云透雾等优点被广泛应用于地表形变的监测中[2 ] .矿区地表通常有植被覆盖,并且容易发生大梯度形变,这使得矿区容易发生失相干现象[3 ] .而小基线集干涉测量技术(small baseline subset-InSAR,SBAS-InSAR)作为一种常用的InSAR形变监测技术,可以有效减弱时空失相干和大气效应的影响,在矿区沉降监测中得到了广泛的研究与应用[4 ⇓ ⇓ -7 ] . ...
Time influence on a formation of a subsidence surface
1
1952
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
优化分段Knothe时间函数求参方法
1
2018
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
优化分段Knothe时间函数求参方法
1
2018
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
厚松散层矿区地表动态移动预计研究
1
2018
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
厚松散层矿区地表动态移动预计研究
1
2018
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
一种基于TerraSAR数据的矿区InSAR最大可检测动态形变梯度模型
1
2020
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
一种基于TerraSAR数据的矿区InSAR最大可检测动态形变梯度模型
1
2020
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
基于Weibull时间序列函数与负指数法的动态沉陷预计
1
2015
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
基于Weibull时间序列函数与负指数法的动态沉陷预计
1
2015
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
厚松散层开采松散层沉降时间序列模型研究
1
2018
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
厚松散层开采松散层沉降时间序列模型研究
1
2018
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
开采沉陷动态预计的正态分布时间函数模型研究
1
2016
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
开采沉陷动态预计的正态分布时间函数模型研究
1
2016
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
地表动态沉陷预测正态时间函数模型优化研究
1
2019
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
地表动态沉陷预测正态时间函数模型优化研究
1
2019
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
Logistic模型在开采沉陷单点预测中的研究
2
2009
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
... [16 ]用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
Logistic模型在开采沉陷单点预测中的研究
2
2009
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
... [16 ]用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
基于InSAR时序形变的矿区全盆地沉降时空演化规律分析
2
2016
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
... [17 ]通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
基于InSAR时序形变的矿区全盆地沉降时空演化规律分析
2
2016
... 矿区开采沉降过程大致可分为3个阶段: 初始沉降期、主要沉降期和残余沉降期,沉降增长呈“S”型[8 ] .描述该过程的时间函数模型主要有Knothe模型[9 ⇓ -11 ] 、Richards模型[12 -13 ] 、正态分布时间函数[14 -15 ] 及Logistic模型[16 -17 ] 等.其中,Logistic模型作为典型的“S”型增长曲线,与矿山开采沉降的3个阶段比较符合.张文志等[16 ] 用Logistic模型曲线拟合开采沉陷-时间关系曲线,并进行了单点开采沉陷预测,结果表明该模型应用于矿区沉降拟合和预测具有较高的精度.杨泽发等[17 ] 通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
... [17 ]通过将合成孔径雷达差分干涉测量(differential interferometry synthetic aperture Radar,D-InSAR)监测到的矿区沉降累加,结合Logistic模型对矿区全盆地沉降规律进行了分析,并对全盆地的后续沉降进行了预测.但仅当整个沉降盆地的沉降过程接近结束时,全盆地的所有点才满足可对后续沉降进行预测的条件.在煤炭开采过程中,整个下沉盆地会有部分点满足预测条件、部分点不满足预测条件,上述不考虑可用条件的预测方法并不适用. ...
基于SBAS的矿区形变监测研究
1
2011
... 其中任一干涉对主影像和从影像获取时间分别设为t A 和t B (t B > t A ),对干涉对进行干涉、去平地效应和去地形相位后,得到的第j 幅干涉图上高相干点(x ,y )上的相位值可以表示为[18 ] : ...
基于SBAS的矿区形变监测研究
1
2011
... 其中任一干涉对主影像和从影像获取时间分别设为t A 和t B (t B > t A ),对干涉对进行干涉、去平地效应和去地形相位后,得到的第j 幅干涉图上高相干点(x ,y )上的相位值可以表示为[18 ] : ...
1
2018
... 式中: B 为参数矩阵; V 为平均形变速率矩阵; δφ 为相位矩阵.采用最小二乘法和奇异值分解法对式(8)求解,得到各时间段内平均形变速率的最小范数解,并对其进行积分得到视线(line of sight,LOS)方向的时间序列形变量[19 ] . ...
1
2018
... 式中: B 为参数矩阵; V 为平均形变速率矩阵; δφ 为相位矩阵.采用最小二乘法和奇异值分解法对式(8)求解,得到各时间段内平均形变速率的最小范数解,并对其进行积分得到视线(line of sight,LOS)方向的时间序列形变量[19 ] . ...
1
2011
... 设xk 为第k 次迭代点, f k f (xk ), gk = g (xk ) = ∇ f (xk ),Bk 为∇ 2 f (xk )的第k 次近似,则第k 次迭代步信赖域二次模型子问题如式(11)所示[20 ] : ...
1
2011
... 设xk 为第k 次迭代点, f k f (xk ), gk = g (xk ) = ∇ f (xk ),Bk 为∇ 2 f (xk )的第k 次近似,则第k 次迭代步信赖域二次模型子问题如式(11)所示[20 ] : ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}