0 引言
受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] 。时空信息融合算法的出现有效缓解了这一矛盾。最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等。Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像。之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等。在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] 。Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性。作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] 。因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难。
本文选取鄱阳湖湿地部分区域作为研究区,以归一化植被指数(normalized difference vegetation index,NDVI)为研究对象,开展STARFM,ESTARFM,FSDAF,Fit-FC和STNLFFM等5种典型遥感时空信息融合算法的适用性评估。文章主要选取了Landsat和MODIS遥感数据,分别开展枯水期、平水期2个时段的融合预测实验,并在空间和光谱2个维度进行算法精度评估,综合比较不同时期水体面积变化对不同算法融合预测结果的影响,讨论不同时期湿地地区对各算法适用性的影响因素。
1 研究区概况与数据源
1.1 研究区概况
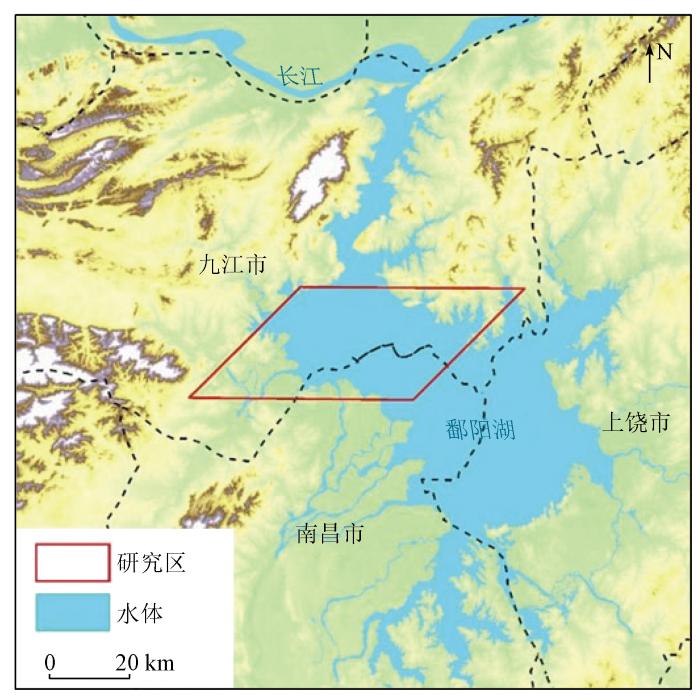
鄱阳湖湿地(N28°22'~29°45',E115°47'~116°45')位于我国江西省北部、长江南岸,为中国第一大淡水湖湿地,湿地植物种类丰富,其中一年生草本87种,多年生草本185种[21 ] 。同时鄱阳湖也是众多候鸟迁飞的必经之路,至少有14种濒危候鸟在此越冬,其中白鹤每年来此越冬的数量超过其全球种群数目的98%[22 ] 。鄱阳湖湿地处于亚热带暖湿季风气候区,湖水年均温在18 ℃左右,年均降水量为1 620 mm左右,水体面积季节性变化显著[19 ] 。以2017年数据为例,2月份水域面积最小,只有745 km2 ; 7月份水域面积最大可达3 085 km2 ,是最小面积的4倍以上[20 ] 。本研究样本区域位于赣江河口到都昌大矶山之间(图1 ),样区的总面积约1 500 km2 ,湿地内水道、洲滩、岛屿、内湖和汊港交错,沙滩、泥滩和草滩与水体相互转化,地物特征复杂多变。
图1
图1
研究区域位置
Fig.1
Location of the study area
1.2 数据源及其预处理
本研究主要采用Landsat8/9 OLI Collection 2 level 2 Tier 1(空间分辨率为30 m)和MOD09GA(空间分辨率为500 m)的影像数据。所有数据下载于美国地质调查局官网(https://earthexplorer.usgs.gov/ ),NDVI指数由红光波段和近红外波段计算得到。本文共选取8张遥感影像,影像获取时间见表1 。为避免粗空间分辨率影像因投影坐标系的转换和重采样导致地物信息丢失过多的问题,本研究将所有数据转换为MODIS数据采用的Sinusoidal投影,并根据影像特征进行地理配准,然后按照时空融合算法中像元对齐原则对Landsat像元进行重采样。采样后的一个MODIS像元对应16×16个Landsat像元。
2 时空信息融合方法
2.1 STARFM算法
STARFM时空融合算法[4 ] 利用一对t 1 t 2 t 2 t 1 t 2 w L ( x w / 2 , y w / 2 ) t 2
(1) $\begin{array}{c} L\left(x_{\frac{w}{2}}, y_{\frac{w}{2}}, t_{2}\right)=\sum_{i=1}^{w} \sum_{j=1}^{w} \sum_{k=1}^{N} W_{i j k}\left[L\left(x_{i}, y_{j}, t_{1}\right)+\right. \\\left.M\left(x_{i}, y_{j}, t_{2}\right)-M\left(x_{i}, y_{j}, t_{1}\right)\right], \end{array}$
式中: N ( x i , y j ) w W i j k L ( x i , y j , t 1 ) M ( x i , y j , t 1 ) t 1 M (xi ,yj ,t 2 )为MODIS影像t 2 时刻对应相似像元的反射率。
2.2 ESTARFM算法
ESTARFM时空融合算法[5 ] 利用t 1 t 2 t p t p V i j ( x i , y j ) w W i j k t p t 1 t 2 t p L ( x w / 2 , y w / 2 , t p )
(2) L ( x w 2 , y w 2 , t p ) = L ( x w 2 , y w 2 , t 1 ) + ∑ i = 1 w ∑ j = 1 w ∑ k = 1 N W i j k V i j ( x i , y j ) [ M ( x i , y j , t p ) - M ( x i , y j , t 1 ) ]
2.3 FSDAF算法
FSDAF时空融合算法[6 ] 根据一对t 1 t 2 t 2 r ( x i j , y i j ) F t 2 p r e x i j , y i j
(3) F t 2 p r e x i j , y i j = F t 1 x i j , y i j + ∑ c = 1 N W c [ r x i j , y i j + Δ F k ]
式中: ( x i j , y i j ) i j F t 1 ( x i j , y i j ) t 1 W c Δ F k
2.4 Fit-FC算法
Fit-FC时空融合算法[7 ] 同样根据一对t 1 t 2 t 2 t 1 t 2 C t 1 和 C t 2 w t 1 C t 1 t 2 C ' t 2 C t 2 R c r ( x i , y j ) t 1 F t 1 t 2 F t 2 R M r ( x i , y j ) t 2 F t 2 p r e
2.5 STNLFFM算法
STNLFFM时空融合算法[8 ] 既可以根据1对t 1 t 1 t 3 t 2 [8 ] 充分利用了时空非局部相似性信息,结合局部相似像元一起产生预测日期的未知像元。比如同一条河流不仅在邻域范围上有相似像元,在其他位置上的像元仍然具有相似性。因此,该算法在线性关系的基础上增加了新的权重计算函数,从而最终得到预测影像F x i , y j , t p
(4) F x i , y j , t p = ∑ k = 1 K ∑ n = 1 N W s ( x i , y j , t k ) W f [ a x i , y j , Δ t k F x i , y j , t k + b x i , y j , Δ t k ]
式中: K a x i , y j , Δ t k b x i , y j , Δ t k k W s ( x i , y j , t k ) W f
3 实验方案
3.1 实验方案设计
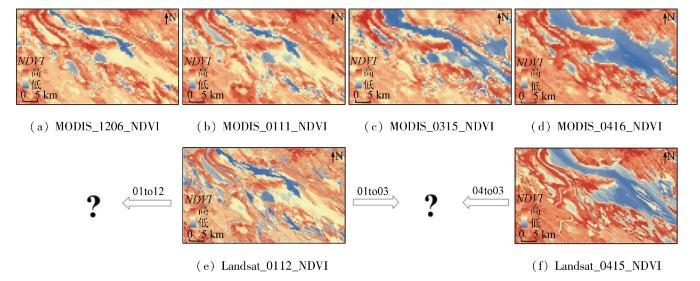
本研究针对鄱阳湖湿地平枯水期时间及地物变化特征设计了2类融合预测实验: 用1月份影像预测12月份影像,记作实验01to12,主要分析冬季枯水期NDVI影像的预测情况。输入的影像为1对,采用STARFM,Fit-FC,FSDAF和STNLFFM这4种算法; 用1月份和4月份影像分别预测3月份影像,分别记作实验01to03和实验04to03。前者主要分析枯水期至平水期之间水体面积逐渐上涨时NDVI影像的融合预测情况,后者主要分析春季平水期NDVI影像的融合预测情况。采用STARFM,ESTARFM,Fit-FC,FSDAF和STNLFFM这5种算法。其中,将输入2对粗细分辨率影像(1月和4月)的STNLFFM算法记作STNLFFM2 ,同其他算法一起比较。
实验方案如图2 所示(图中为Sinusoidal投影显示),“MODIS_1206_NDVI”表示输入的是研究区12月06日MODIS的NDVI影像,以下同理。
图2
图2
影像融合实验方案
Fig.2
Experiment scheme of image fusion
另外,本研究为了探究窗口大小对算法的影响,在实验前期记录了不同窗口大小对NDVI影像进行融合的结果。窗口大小从15~50像元,每间隔5个像元大小,选取各算法最优窗口的融合结果进行比较。STNLFFM算法设计的窗口大小为奇数,范围从15~51像元。研究中NDVI影像的预测采取先计算后融合的顺序。
3.2 时空信息融合算法精度评价指标
为了衡量遥感影像的融合质量,时空信息融合算法发展出了许多的精度评价指标,其中包括使用最为广泛的均方根误差(root mean square error,RMSE)、绝对平均差(average absolute difference,AAD)等。Zhu等[23 ] 为了减少多个指标间信息冗余的问题,提出了一种新的评价指标: 在光谱的维度上适宜采用平均差(average difference,AD)和RMSE的组合进行评价; 在空间维度上适宜采用Robert’s Edge(记作Edge)和局部二进制模式(local binary pattern,LBP)的组合进行评价,后两者反映了融合图像在边缘信息和纹理信息的精度。计算方式见表2 。RMSE指标的取值范围为[0,1],值越小代表融合影像的光谱信息误差越小。AD,Edge和LBP指标的取值范围均为[-1,1],绝对值越小越好,负值或正值分别表示对光谱信息的低估或高估和边缘信息、纹理特征的平滑或锐化。评价指标公式如下:
(5) R M S E = ∑ i = 1 S ( P i - R i ) 2 S
(6) A D = 1 S ∑ i = 1 S ( P i - R i )
(7) E d g e = D i , j - D i + 1 , j + 1 + D i , j + 1 - D i + 1 , j
(8) L B P = d e c i m a l d 1 , d 2 , … , d 8
(9) d i = 1 D i > D c 0 其 他
式中: S 为影像像元的总个数; P i i R i i D i , j i j d e c i m a l D i D c
4 结果与分析
4.1 冬季枯水期影像预测结果
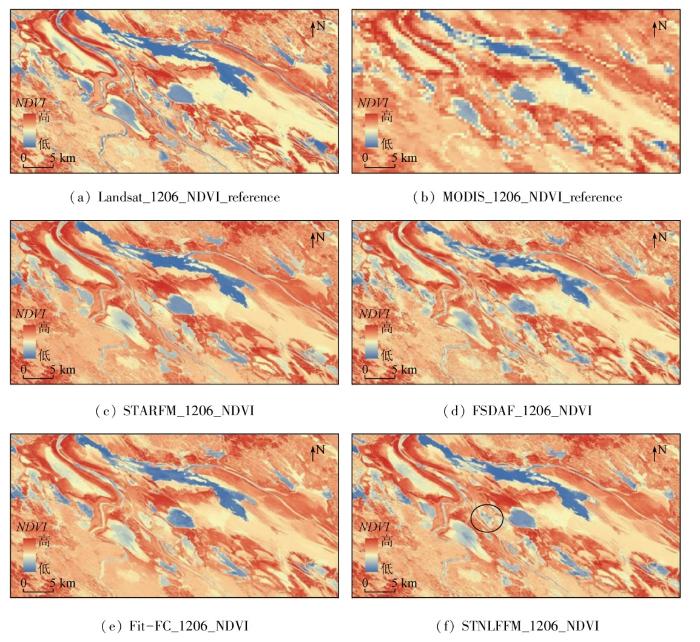
在实验01to12中,从指标结果(表2 )来看,STARFM,FSDAF,Fit-FC和STNLFFM这4种算法的最优窗口大小分别为50,15,50和51。在总体误差(AD ,RMSE ,Edge 和LBP 4个指标的绝对值之和)水平上,FSDAF算法的预测效果最优,为0.433 5。所有算法的AD指标均被高估,Edge边界信息指标均被平滑; 在LBP指标上,STARFM和STNLFFM算法的纹理信息被平滑,FSDAF和Fit-FC算法的纹理信息被锐化。STARFM算法的AD和RMSE指标最优,在光谱维度上预测效果较好; FSDAF算法的Edge和LBP指标最优,在空间维度上的预测效果较好,该算法的这种特性主要是由于TPS的贡献。从预测影像(图3 )上看,Fit-FC算法有少量空值出现(在影像边缘区域); FSDAF算法预测影像的水体边界像元较为模糊; STNLFFM预测的影像存在像元边界明显的情况(在黑色椭圆区域)。
图3
图3
实验01to12 NDVI影像融合结果
Fig.3
NDVI image fusion results of experiment 01to12
4.2 枯水期影像预测平水期结果
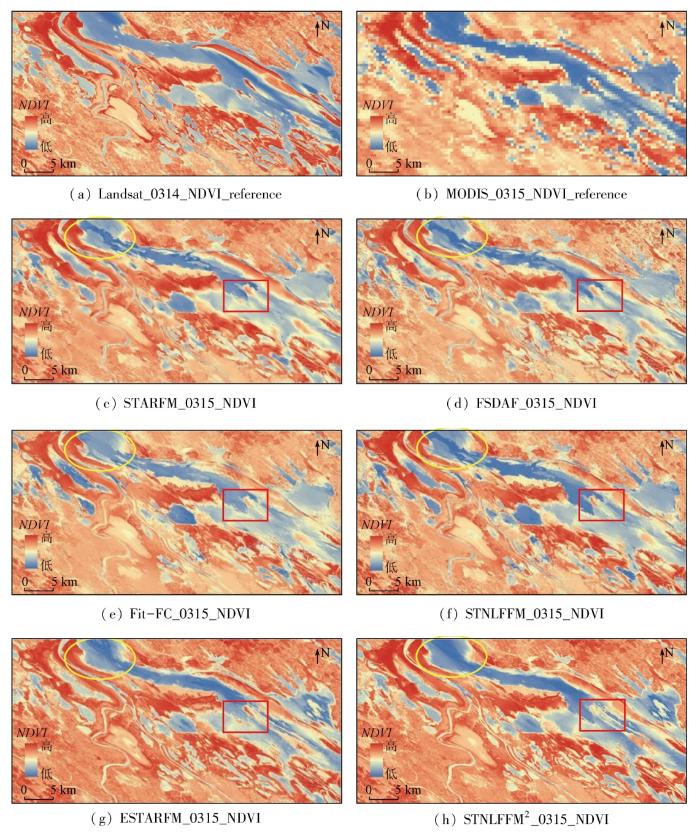
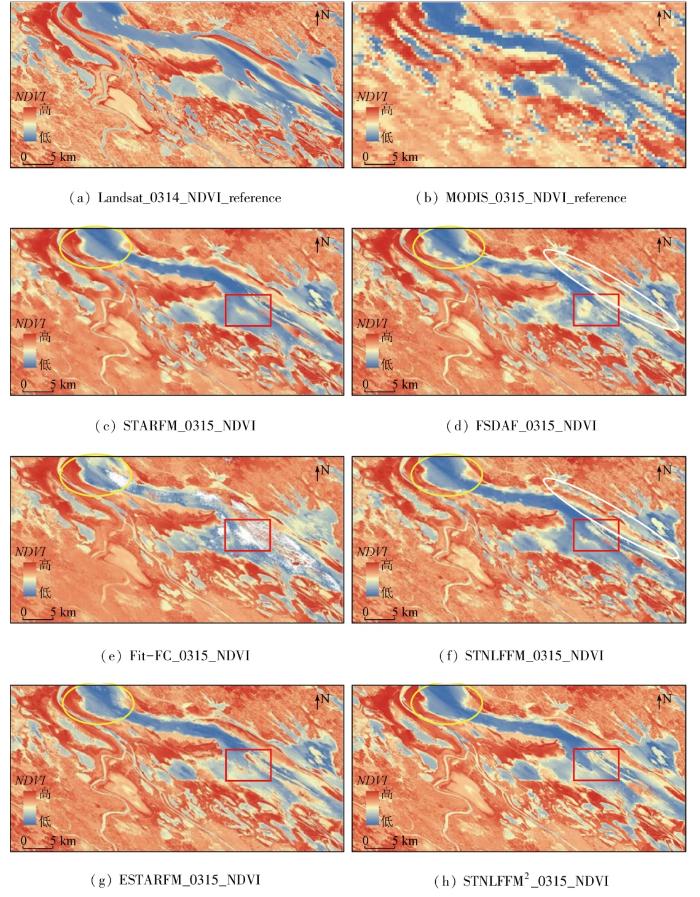
在实验01to03中,从指标结果(表3 )来看,STARFM,FSDAF,Fit-FC,STNLFFM,ESTARFM和STNLFFM2 这6种算法的最优窗口大小分别为15,20,50,51,50和51。在仅有一对粗细分析率影像输入的前4种算法当中,FSDAF算法的总体误差最小,为0.506 1,其Edge和LBP指标也最优。在2对粗细分辨率影像输入的ESTARFM和STNLFFM2 算法中,ESTARFM算法总体误差最优,为0.467 0,但纹理信息丢失严重; STNLFFM2 算法在AD,RMSE和LBP纹理等指标上达到最优,但边缘信息丢失严重。从预测影像(图4 )上来看,STARFM,FSDAF和STNLFFM算法的预测结果在左上黄色椭圆区域与真实影像的差距比较明显; STNLFFM算法在小部分区域的像元边界问题仍然存在。另外,在红色矩形区域,STNLFFM2 算法非水体像元信息丢失严重。
图4
图4
实验01to03 NDVI影像融合结果
Fig.4
NDVI image fusion results of experiment 01to03
4.3 春季平水期影像预测结果
在实验04to03中,从指标结果(表4 )来看,STARFM,FSDAF,Fit-FC,STNLFFM,ESTARFM和STNLFFM2 这6种算法的最优窗口大小分别为15,30,50,15,50和51,其中Fit-FC,ESTARFM和STNLFFM2 算法的最优窗口大小始终保持稳定。在前4种算法中,STNLFFM算法的总体误差最优,为0.514 7,并且在LBP纹理特征指标上相较于STARFM,FSDAF和Fit-FC算法有较大提升。从预测影像(图5 )上看,在黄色椭圆区域,大部分算法的影像质量相较于实验01to03都有了很大的提升,但Fit-FC算法预测的影像效果较差,整张影像出现大量空白像元; FSDAF算法和STNLFFM算法在白色椭圆区域的融合质量与真实影像相差较大。对于拥有2对粗细分辨率影像输入的ESTARFM和STNLFFM2 算法来说,融合预测效果仍优于前4种算法。
图5
图5
实验04to03 NDVI影像融合结果
Fig.5
NDVI image fusion results of experiment 04to03
5 不同算法在湿地地区适用性讨论
在本实验涉及的5种算法中,部分算法在不同时期的最适窗口大小会有变化,改变移动窗口大小对融合影像空间Edge边界和LBP纹理信息有一定的影响。Hu等[24 ] 认为STARFM,ESTARFM和FSDAF等算法调整窗口参数,在农田、森林和草地等地区对NDVI影像融合结果的影响可以忽略不计。但在湿地地区进行窗口大小参数实验时,指标数值的上下波动大约在0.01~0.03之间,需要进一步观察。相关研究表明,不同时空信息融合算法因计算原理的不同,表现出的差异多集中在预测影像的空间方差上[25 ⇓ ⇓ -28 ] ,这与本文的Edge边缘信息指标和LBP纹理信息指标相对应。土地覆盖类型的变化会改变影像方差,而在研究区域内,湿地地物类型的变化主要受水体面积的影响。
所以,推测时空融合算法的差异可能与水体和非水体的面积占比有直接关系,对水体和非水体区域的融合存在最优算法。由此,本文将湿地地区分为非水体部分与水体部分,对各算法的融合精度进行比较。实验中将细分辨率Landsat参考影像通过归一化水体指数(normalized difference water index,NDWI)阈值法进行水体区域和非水体区域的划分。
实验结果(表5 )显示,在仅有一对粗细分辨率影像输入的情况下,FSDAF算法在非水体区域的预测效果最好,窗口大小稳定在20像元; STNLFFM算法在水体区域的预测效果最好,窗口大小稳定在51像元。在需要2对粗细分辨率影像输入的算法中,ESTARFM和STNLFFM2 算法在水体和非水体区域都优于前4种算法。但是,ESTARFM算法在非水体区域的预测效果最好,STNLFFM2 算法在水体区域的融合效果最好,总误差STNLFFM2 算法预测效果占优。
结合前文和表5 结果可以看到,原本在总误差上融合效果最好ESTARFM算法,其单独在水体区域的总体误差反而要高于STNLFFM2 算法,这表明其融合结果在一定程度上受到了水体区域的影响。在水体面积增加的过程中,水体区域会存在许多时空非局部相似信息,STNLFFM算法在计算原理上充分利用了这些信息,所以其在水体区域的融合更具优势。当输入2对粗细分辨率影像时,STNLFFM2 算法在水体区域的融合优势进一步提升。
6 结论
本文比较了5种时空信息融合算法,STARFM,FSDAF,Fit-FC,STNLFFM和ESTARFM,利用鄱阳湖湿地部分研究样区的MODIS和Landsat数据集,开展湿地枯水期、平水期融合实验,采用新型评价方法,从光谱信息和空间信息2个维度进行精度评价。最终得到以下结论:
1)在湿地地区的NDVI影像预测精度上,ESTARFM算法最优,总体误差为0.467 0。FSDAF和STNLFFM算法在不同时期的影像上精度不一,在枯水期陆地面积占优时,FSDAF算法预测效果最好,总体误差为0.433 5; 在平水期水体面积增大时,STNLFFM算法预测效果最好,总体误差为0.514 7。Fit-FC和STARFM算法的影像预测精度较差。
2)不同时空信息融合算法在湿地地区不同时期的信息保留特性不同。当湿地位于枯水期土地覆盖类型未发生较大改变时,STARFM算法光谱信息保留能力较强,FSDAF算法空间信息保留能力较强。当湿地位于平水期土地覆盖类型发生巨大改变时,ESTARFM算法和STNLFFM2 算法的信息保留能力较为均衡。
3)湿地地区水体面积的变化是影响时空信息融合算法有效性的重要因素,不同时空信息融合算法在湿地地区水体和非水体之间的融合优势有所不同。无论是在枯水期还是平水期,STNLFFM算法在水体区域的融合能力最强。
4)不同时空信息融合算法在湿地地区不同时期的选择上有差异。当输入1对影像时,对于陆地面积占优、异质性较强的区域或时期,推荐选择FSDAF算法,窗口大小为20像元; 而对于水体面积占优、同质像元较多的区域或时期,推荐选择STNLFFM算法,窗口大小为51像元。当输入2对影像时,优先选择双时相的融合算法。对陆地面积占比较大或者水陆交界复杂的区域或时期,推荐选择ESTARFM算法,窗口大小为50像元; 对水体面积覆盖较大的区域或时期,推荐选择STNLFFM2 算法,窗口大小为51像元。另外,如果考虑算法运行时间,STNLFFM算法更具优势。
参考文献
View Option
[1]
张立福 , 彭明媛 , 孙雪剑 , 等 . 遥感数据融合研究进展与文献定量分析(1992—2018)
[J]. 遥感学报 , 2019 , 23 (4 ):603 -619 .
[本文引用: 1]
Zhang L F Peng M Y Sun X J et al . Progress and bibliometric analysis of remote sensing data fusion method(1992—2018)
[J]. Journal of Remote Sensing , 2019 , 23 (4 ):603 -619 .
[本文引用: 1]
[2]
Nunez J Otazu X Fors O et al . Multiresolution-based image fusion with additive wavelet decomposition
[J]. IEEE Transactions on Geoscience and Remote Sensing , 1999 , 37 (3 ):1204 -1211 .
[本文引用: 1]
[3]
Acerbi-Junior F W Clevers J G P W Schaepman M E The assessment of multi-sensor image fusion using wavelet transforms for mapping the Brazilian Savanna
[J]. International Journal of Applied Earth Observation and Geoinformation , 2006 , 8 (4 ):278 -288 .
[本文引用: 1]
[4]
Gao F Masek J Schwaller M et al . On the blending of the Landsat and MODIS surface reflectance:Predicting daily Landsat surface reflectance
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2006 , 44 (8 ):2207 -2218 .
[本文引用: 2]
[5]
Zhu X L Chen J Gao F et al . An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions
[J]. Remote Sensing of Environment , 2010 , 114 (11 ):2610 -2623 .
[本文引用: 2]
[6]
Zhu X Helmer E H Gao F et al . A flexible spatiotemporal method for fusing satellite images with different resolutions
[J]. Remote Sensing of Environment , 2016 , 172 :165 -177 .
[本文引用: 2]
[7]
Wang Q M Atkinson P M Spatio-temporal fusion for daily Sentinel-2 images
[J]. Remote Sensing of Environment , 2018 , 204 :31 -42 .
[本文引用: 2]
[8]
Cheng Q Liu H Shen H et al . A spatial and temporal nonlocal filter-based data fusion method
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2017 , 55 (8 ):4476 -4488 .
[本文引用: 3]
[9]
Walker J J de Beurs K M Wynne R H et al . Evaluation of Landsat and MODIS data fusion products for analysis of dryland forest phenology
[J]. Remote Sensing of Environment , 2012 , 117 :381 -393 .
[本文引用: 1]
[10]
赵艳丽 . 时空融合技术在高时空分辨率NDVI数据重构中的应用 [D]. 太原 : 太原理工大学 , 2015 .
[本文引用: 1]
Zhao Y L Reconstruction of NDVI data with high-spatial and cemporal Vesolution using spatio-temporal fusion technique [D]. Taiyuan : Taiyuan University of Technology , 2015 .
[本文引用: 1]
[11]
张伟 , 李玮 , 陶冠宏 , 等 . 利用STARFM模型提高复杂地表下复种指数遥感提取精度
[J]. 农业工程学报 , 2020 , 36 (21 ):175 -185 .
[本文引用: 1]
Zhang W Li W Tao G H et al . Improvement of extraction accuracy for cropping intensity in complex surface regions using STARFM
[J]. Journal of Agricultural Engineering , 2020 , 36 (21 ):175 -185 .
[本文引用: 1]
[12]
管琪卉 , 丁明军 , 张华 , 等 . ESTARFM算法在长江中下游平原地区的适用性研究
[J]. 地球信息科学学报 , 2021 , 23 (6 ):1118 -1130 .
DOI:10.12082/dqxxkx.2021.200404
[本文引用: 1]
时空融合技术是目前解决单一遥感数据源难以同步获取高时空分辨率数据的有效途径。然而,如何设置参数使模型融合效果最佳,如何设置在植被监测中广泛应用的植被指数的融合步骤,进而获得最佳的植被指数时序数据,目前仍不明晰。本文以长江中下游平原地区的典型县域—南昌县为例,基于Landsat和MODIS多时相数据对当前主流时空融合模型—ESTARFM (Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model)进行参数敏感性分析,并系统地对比分析了2组融合实验RI(先融合波段反射率后计算植被指数)和IR(先计算植被指数后直接融合)的融合效果。结果表明: ① ESTARFM算法中参数的敏感性在波段反射率、植被指数融合中表现出相似的特征,随着滑动窗口与相似像元数量的增大,融合误差整体呈现出先减小后趋于稳定或增大的趋势;在ESTARFM算法应用中,存在着最佳参数设置范围;② 相较于RI组,IR组模拟结果精度更高(R2RI-NDVI=0.866,R2IR-NDVI=0.953,R2RI-EVI =0.814,R2IR-EVI =0.930),且能够较好地削弱“斑块”现象,更好地表征出细小地物和纹理特征。研究结果为遥感数据时空融合模型在地块破碎、种植制度多变的复杂环境中的应用提供借鉴和参考。
Guan Q H Ding M J Zhang H et al . Analysis of applicability about ESTARFM in the middle-lower Yangtze Plain
[J]. Journal of Geo-Information Science , 2021 , 23 (6 ):1118 -1130 .
[本文引用: 1]
[13]
郝贵斌 , 吴波 , 张立福 , 等 . ESTARFM模型在西藏色林错湖面积时空变化中的应用分析(1976—2014年)
[J]. 地球信息科学学报 , 2016 , 18 (6 ):833 -846 .
DOI:10.3724/SP.J.1047.2016.00833
[本文引用: 1]
湖泊(特别是内陆湖)作为全球气候变化的敏感区域,是气候变化与环境变异的指示器,其面积变化在一定程度上可反映区域的气候变化。因此,精确监测湖泊面积的时空变化,对分析区域生态环境变化具有重要的意义。本文基于ESTARFM时空数据融合模型,利用MODIS数据模拟了2000年后无法得到的Landsat数据;利用NDWI和MNDWI 2种水体指数并辅以DEM数据分析了1976-2014年西藏色林错湖湖面面积的时空变化;综合湖区周围6个气象站点的气象数据(1970-2014年),探究了湖面面积变化的原因及其对气候变化的响应。结果表明:(1)利用ESTARFM时空融合模型得到的Landsat-Like数据与真实的Landsat数据在水体信息提取方面具有较高的相关性,R2可达0.93,时空数据融合的结果可用于湖泊水体的信息提取;(2)近40年来(1976-2014年),色林错湖处于持续扩张状态,面积呈较显著的增长趋势,增加了近711.652 km2,增幅为42.36%,年平均增长速率约为18.728 km2a-1,增长最快时可达55.954 km2a-1;湖面面积变化先后经历了平稳变化-迅速变化-平稳变化3个阶段;北部湖区在40年间变化最为明显,向北扩展了约22.812 km;2003-2005年,南部湖区已与雅根错湖连为一体,随后二者共同扩张;(3)气温的持续升高造成的冰雪融水补给增加可能是导致湖泊面积扩张的主要因素,风速的降低为次要因素,湖面的面积变化与降水量、日照时数的变化相关性不明显。
Hao G B Wu B Zhang L F et al . Temporal and spatial variation analysis of the area of Siling Co Lake in Tibet based on ESTARFM(1976-2014)
[J]. Journal of Geo-Information Science , 2016 , 18 (6 ):833 -846 .
[本文引用: 1]
[14]
[本文引用: 1]
Cheng X Q Hong Y T Chen J S et al . A study of the long-term remote sensing dynamic monitoring of inland based on ESTARFM
[J]. Remote Sensing for Land and Resources , 2020 , 32 (3 ):183 -190 .doi:10.6046/gtzyyg.2020.03.24 .
[本文引用: 1]
[15]
Zhai H Huang F Qi H Generating high resolution LAI based on a modified FSDAF model
[J]. Remote Sensing , 2020 , 12 (1 ):150 .
[本文引用: 1]
[16]
Guo D Z Shi W Z Hao M et al . FSDAF 2.0:Improving the performance of retrieving land cover changes and preserving spatial details
[J]. Remote Sensing of Environment , 2020 , 248 :111973 .
[本文引用: 1]
[17]
Li X D Foody G M Boyd D S et al . SFSDAF:An enhanced FSDAF that incorporates sub-pixel class fraction change information for spatio-temporal image fusion
[J]. Remote Sensing of Environment , 2020 , 237 :111537 .
[本文引用: 1]
[18]
Chen B Huang B Xu B Comparison of spatiotemporal fusion models:A review
[J]. Remote Sensing , 2015 , 7 (2 ):1798 -1835 .
[本文引用: 1]
[19]
谢诗怡 , 况润元 , 宋子豪 . 鄱阳湖水域面积变化特征及对气象因素的响应
[J]. 中国农村水利水电 , 2022 (7 ):103 -109 .
[本文引用: 2]
鄱阳湖是中国最大的淡水湖,是世界上重要的湿地,近年来旱涝灾害频发,引起了广泛关注。鉴于其高频波动的特征,有必要使用长期的高时间分辨率卫星对其进行监测。从2001-2020年MODIS数据中提取鄱阳湖水域面积分析其变化特征,并利用Mann-Kendall突变检验和小波分析法研究鄱阳湖水域面积对气象因素的响应情况。结果表明:①鄱阳湖季节性变化显著,2003年后枯水期持续时间有一定程度延长,研究期内最小水域和最大水域的年际变化趋势呈弱相反;②水域面积在2004年发生突变后呈下降,面积时间序列在主周期18个月(约1.5 a)上变化具有全域性,正负交替规律较强;③鄱阳湖水域面积变化对气象因素存在响应,不同水情下气象作用有差异,降雨量是影响水域面积的主导因素。
Xie S Y Kuang R Y Song Z H Variation characteristics of water area Poyang Lake and its response to meteorological factors
[J]. China Rural Water and Hydropower , 2022 (7 ):103 -109 .
[本文引用: 2]
[20]
姚杰鹏 , 杨磊库 , 陈探 , 等 . 基于Sentinel-1,2和Landsat8时序影像的鄱阳湖湿地连续变化监测研究
[J]. 遥感技术与应用 , 2021 , 36 (4 ):760 -776 .
[本文引用: 2]
Yao J P Yang L K Chen T et al . Consecutive monitoring of the Poyang Lake wetland by integrating Sentinel-2 with sentinel-1 and Landsat8 data
[J]. Remote Sensing Technology and Application , 2021 , 36 (4 ):760 -776 .
[本文引用: 2]
[21]
许军 , 王召滢 , 唐山 , 等 . 鄱阳湖湿地植物多样性资源调查与分析
[J]. 西北林学院学报 , 2013 , 28 (3 ):93 -97 .
[本文引用: 2]
Xu J Wang Z Y Tang S et al . Investigation and analysis of the resources of wetland plant diversity in Poyang lake
[J]. Journal of Northwest Forestry University , 2013 , 28 (3 ):93 -97 .
[本文引用: 2]
[22]
沈陆平 , 方朝阳 , 肖昕 , 等 . 2021—2022年鄱阳湖10种珍稀候鸟定点观测数据集
[J]. 中国科学数据(中英文网络版) , 2022 , 7 (3 ):324 -333 .
[本文引用: 1]
Shen L P Fang C Y Xiao X et al . A dataset of fixed-point observations of 10 rare migratory birds in Poyang Lake from 2021 to 2022
[J]. China Scientific Data Chinese and English online version) , 2022 , 7 (3 ):324 -333 .
[本文引用: 1]
[23]
Zhu X L Zhan W F Zhou J X et al . A novel framework to assess all-round performances of spatiotemporal fusion models
[J]. Remote Sensing of Environment , 2022 , 274 :113002 .
[本文引用: 1]
[24]
Hu Y Wang H Niu X et al . Comparative analysis and comprehensive trade-off of four spatiotemporal fusion models for NDVI generation
[J]. Remote Sensing , 2022 , 14 (23 ):5996 .
[本文引用: 1]
[25]
Emelyanova I V McVicar T R Van Niel T G et al . Assessing the accuracy of blending Landsat-MODIS surface reflectances in two landscapes with contrasting spatial and temporal dynamics:A framework for algorithm selection
[J]. Remote Sensing of Environment , 2013 , 133 :193 -209 .
[本文引用: 1]
[26]
Zhou J X Chen J Chen X H et al . Sensitivity of six typical spatiotemporal fusion methods to different influential factors:A comparative study for a normalized difference vegetation index time series reconstruction
[J]. Remote Sensing of Environment , 2021 , 252 :112130 .
[本文引用: 1]
[27]
[本文引用: 1]
Shi C L Wang X H Zhang M et al . Analysis of the applicability of three remote sensing spatiotemporal fusion algorithms in flood monitoring
[J]. Remote Sensing for Land and Resources , 2020 , 32 (2 ):111 -119 .doi:10.6046/gtzyyg.2020.02.15 .
[本文引用: 1]
[28]
雷晨阳 , 孟祥超 , 邵枫 . 遥感影像时—空融合的“点”—“线”—“面”质量评价
[J]. 遥感学报 , 2021 , 25 (3 ):791 -802 .
[本文引用: 1]
Lei C Y Meng X C Shao F Spatio-temporal fusion quality evaluation based on “Point”-“Line”-“Plane” aspects
[J]. National Remote Sensing Bulletin , 2021 , 25 (3 ):791 -802 .
[本文引用: 1]
遥感数据融合研究进展与文献定量分析(1992—2018)
1
2019
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
遥感数据融合研究进展与文献定量分析(1992—2018)
1
2019
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
Multiresolution-based image fusion with additive wavelet decomposition
1
1999
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
The assessment of multi-sensor image fusion using wavelet transforms for mapping the Brazilian Savanna
1
2006
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
On the blending of the Landsat and MODIS surface reflectance:Predicting daily Landsat surface reflectance
2
2006
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
... STARFM时空融合算法[4 ] 利用一对 t 1 t 2 t 2 t 1 t 2 w L ( x w / 2 , y w / 2 ) t 2
An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions
2
2010
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
... ESTARFM时空融合算法[5 ] 利用 t 1 t 2 t p t p V i j ( x i , y j ) w W i j k t p t 1 t 2 t p L ( x w / 2 , y w / 2 , t p )
A flexible spatiotemporal method for fusing satellite images with different resolutions
2
2016
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
... FSDAF时空融合算法[6 ] 根据一对 t 1 t 2 t 2 r ( x i j , y i j ) . 最后,利用邻近相似像元得到最终的预测结果 F t 2 p r e x i j , y i j
Spatio-temporal fusion for daily Sentinel-2 images
2
2018
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
... Fit-FC时空融合算法[7 ] 同样根据一对 t 1 t 2 t 2 t 1 t 2 C t 1 和 C t 2 w t 1 C t 1 t 2 C ' t 2 C t 2 R c r ( x i , y j ) . 之后,再将 t 1 F t 1 t 2 F t 2 R M r ( x i , y j ) t 2 F t 2 p r e . ...
A spatial and temporal nonlocal filter-based data fusion method
3
2017
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
... STNLFFM时空融合算法[8 ] 既可以根据1对 t 1 t 1 t 3 t 2 [8 ] 充分利用了时空非局部相似性信息,结合局部相似像元一起产生预测日期的未知像元.比如同一条河流不仅在邻域范围上有相似像元,在其他位置上的像元仍然具有相似性.因此,该算法在线性关系的基础上增加了新的权重计算函数,从而最终得到预测影像 F x i , y j , t p
... [8 ]充分利用了时空非局部相似性信息,结合局部相似像元一起产生预测日期的未知像元.比如同一条河流不仅在邻域范围上有相似像元,在其他位置上的像元仍然具有相似性.因此,该算法在线性关系的基础上增加了新的权重计算函数,从而最终得到预测影像 F x i , y j , t p
Evaluation of Landsat and MODIS data fusion products for analysis of dryland forest phenology
1
2012
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
1
2015
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
1
2015
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
利用STARFM模型提高复杂地表下复种指数遥感提取精度
1
2020
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
利用STARFM模型提高复杂地表下复种指数遥感提取精度
1
2020
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
ESTARFM算法在长江中下游平原地区的适用性研究
1
2021
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
ESTARFM算法在长江中下游平原地区的适用性研究
1
2021
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
ESTARFM模型在西藏色林错湖面积时空变化中的应用分析(1976—2014年)
1
2016
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
ESTARFM模型在西藏色林错湖面积时空变化中的应用分析(1976—2014年)
1
2016
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
基于ESTARFM的内陆湖泊水体遥感动态变化监测
1
2020
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
基于ESTARFM的内陆湖泊水体遥感动态变化监测
1
2020
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
Generating high resolution LAI based on a modified FSDAF model
1
2020
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
FSDAF 2.0:Improving the performance of retrieving land cover changes and preserving spatial details
1
2020
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
SFSDAF:An enhanced FSDAF that incorporates sub-pixel class fraction change information for spatio-temporal image fusion
1
2020
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
Comparison of spatiotemporal fusion models:A review
1
2015
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
鄱阳湖水域面积变化特征及对气象因素的响应
2
2022
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
... 鄱阳湖湿地(N28°22'~29°45',E115°47'~116°45')位于我国江西省北部、长江南岸,为中国第一大淡水湖湿地,湿地植物种类丰富,其中一年生草本87种,多年生草本185种[21 ] .同时鄱阳湖也是众多候鸟迁飞的必经之路,至少有14种濒危候鸟在此越冬,其中白鹤每年来此越冬的数量超过其全球种群数目的98%[22 ] .鄱阳湖湿地处于亚热带暖湿季风气候区,湖水年均温在18 ℃左右,年均降水量为1 620 mm左右,水体面积季节性变化显著[19 ] .以2017年数据为例,2月份水域面积最小,只有745 km2 ; 7月份水域面积最大可达3 085 km2 ,是最小面积的4倍以上[20 ] .本研究样本区域位于赣江河口到都昌大矶山之间(图1 ),样区的总面积约1 500 km2 ,湿地内水道、洲滩、岛屿、内湖和汊港交错,沙滩、泥滩和草滩与水体相互转化,地物特征复杂多变. ...
鄱阳湖水域面积变化特征及对气象因素的响应
2
2022
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
... 鄱阳湖湿地(N28°22'~29°45',E115°47'~116°45')位于我国江西省北部、长江南岸,为中国第一大淡水湖湿地,湿地植物种类丰富,其中一年生草本87种,多年生草本185种[21 ] .同时鄱阳湖也是众多候鸟迁飞的必经之路,至少有14种濒危候鸟在此越冬,其中白鹤每年来此越冬的数量超过其全球种群数目的98%[22 ] .鄱阳湖湿地处于亚热带暖湿季风气候区,湖水年均温在18 ℃左右,年均降水量为1 620 mm左右,水体面积季节性变化显著[19 ] .以2017年数据为例,2月份水域面积最小,只有745 km2 ; 7月份水域面积最大可达3 085 km2 ,是最小面积的4倍以上[20 ] .本研究样本区域位于赣江河口到都昌大矶山之间(图1 ),样区的总面积约1 500 km2 ,湿地内水道、洲滩、岛屿、内湖和汊港交错,沙滩、泥滩和草滩与水体相互转化,地物特征复杂多变. ...
基于Sentinel-1,2和Landsat8时序影像的鄱阳湖湿地连续变化监测研究
2
2021
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
... 鄱阳湖湿地(N28°22'~29°45',E115°47'~116°45')位于我国江西省北部、长江南岸,为中国第一大淡水湖湿地,湿地植物种类丰富,其中一年生草本87种,多年生草本185种[21 ] .同时鄱阳湖也是众多候鸟迁飞的必经之路,至少有14种濒危候鸟在此越冬,其中白鹤每年来此越冬的数量超过其全球种群数目的98%[22 ] .鄱阳湖湿地处于亚热带暖湿季风气候区,湖水年均温在18 ℃左右,年均降水量为1 620 mm左右,水体面积季节性变化显著[19 ] .以2017年数据为例,2月份水域面积最小,只有745 km2 ; 7月份水域面积最大可达3 085 km2 ,是最小面积的4倍以上[20 ] .本研究样本区域位于赣江河口到都昌大矶山之间(图1 ),样区的总面积约1 500 km2 ,湿地内水道、洲滩、岛屿、内湖和汊港交错,沙滩、泥滩和草滩与水体相互转化,地物特征复杂多变. ...
基于Sentinel-1,2和Landsat8时序影像的鄱阳湖湿地连续变化监测研究
2
2021
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
... 鄱阳湖湿地(N28°22'~29°45',E115°47'~116°45')位于我国江西省北部、长江南岸,为中国第一大淡水湖湿地,湿地植物种类丰富,其中一年生草本87种,多年生草本185种[21 ] .同时鄱阳湖也是众多候鸟迁飞的必经之路,至少有14种濒危候鸟在此越冬,其中白鹤每年来此越冬的数量超过其全球种群数目的98%[22 ] .鄱阳湖湿地处于亚热带暖湿季风气候区,湖水年均温在18 ℃左右,年均降水量为1 620 mm左右,水体面积季节性变化显著[19 ] .以2017年数据为例,2月份水域面积最小,只有745 km2 ; 7月份水域面积最大可达3 085 km2 ,是最小面积的4倍以上[20 ] .本研究样本区域位于赣江河口到都昌大矶山之间(图1 ),样区的总面积约1 500 km2 ,湿地内水道、洲滩、岛屿、内湖和汊港交错,沙滩、泥滩和草滩与水体相互转化,地物特征复杂多变. ...
鄱阳湖湿地植物多样性资源调查与分析
2
2013
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
... 鄱阳湖湿地(N28°22'~29°45',E115°47'~116°45')位于我国江西省北部、长江南岸,为中国第一大淡水湖湿地,湿地植物种类丰富,其中一年生草本87种,多年生草本185种[21 ] .同时鄱阳湖也是众多候鸟迁飞的必经之路,至少有14种濒危候鸟在此越冬,其中白鹤每年来此越冬的数量超过其全球种群数目的98%[22 ] .鄱阳湖湿地处于亚热带暖湿季风气候区,湖水年均温在18 ℃左右,年均降水量为1 620 mm左右,水体面积季节性变化显著[19 ] .以2017年数据为例,2月份水域面积最小,只有745 km2 ; 7月份水域面积最大可达3 085 km2 ,是最小面积的4倍以上[20 ] .本研究样本区域位于赣江河口到都昌大矶山之间(图1 ),样区的总面积约1 500 km2 ,湿地内水道、洲滩、岛屿、内湖和汊港交错,沙滩、泥滩和草滩与水体相互转化,地物特征复杂多变. ...
鄱阳湖湿地植物多样性资源调查与分析
2
2013
... 受传感器性能参数限制,目前在轨遥感卫星往往难以兼顾高时间分辨率和高空间分辨率,在部分高时空动态观测分析领域的应用有所受限[1 ] .时空信息融合算法的出现有效缓解了这一矛盾.最初遥感数据的融合多集中于空间和光谱信息的集成增强,如小波变换[2 -3 ] 等.Gao等[4 ] 首次根据权重分配的原理,提出时空自适应地表反射率融合模型(spatial and temporal adaptive reflectance fusion model,STARFM),成功融合出高时空分辨率的地表反射率影像.之后,在权重分配思想的作用下,逐渐发展出几种具有代表性的时空融合算法,比如基于动态加权思想的算法(enhanced spatial and temporal adaptive reflectance fusion model,ESTARFM)[5 ] 、基于加权、混合像元分解和空间插值等多种方法的(flexible spatiotemporal data fusion,FSDAF)算法[6 ] 、基于回归和残差分配思想的算法(regression model fitting, spatial filtering and residual compensation,Fit-FC) [7 ] 和基于非局部相似像元加权思想的算法(spatial and temporal nonlocal filter-based fusion model,STNLFFM)[8 ] 等.在这一类算法中,STARFM算法多应用于大范围监测领域,例如物候分析[9 ] 和指数重构与提取[10 -11 ] 等; ESTARFM算法在陆地湖泊的分析观测有诸多应用[12 ⇓ -14 ] ; FSDAF算法则在亚像元尺度上发展出许多特异性的算法[15 ⇓ -17 ] .Chen等[18 ] 指出不同预测模式的算法模型适用性不同,同时景观异质性会显著影响模型性能,更复杂的景观格局会为时空融合预测带来更高的不确定性.作为水陆交界的湿地区域,具有高度动态和复杂的生境条件,地表覆被空间异质性强[19 ] ,水陆转换频繁[20 ] ,植被类型以生长期短的草本植物为主[21 ] .因此,遥感影像像元之间通常很难呈现出理想状态下的线性变化,给遥感时空信息融合算法在湿地区域的应用带来了诸多困难. ...
... 鄱阳湖湿地(N28°22'~29°45',E115°47'~116°45')位于我国江西省北部、长江南岸,为中国第一大淡水湖湿地,湿地植物种类丰富,其中一年生草本87种,多年生草本185种[21 ] .同时鄱阳湖也是众多候鸟迁飞的必经之路,至少有14种濒危候鸟在此越冬,其中白鹤每年来此越冬的数量超过其全球种群数目的98%[22 ] .鄱阳湖湿地处于亚热带暖湿季风气候区,湖水年均温在18 ℃左右,年均降水量为1 620 mm左右,水体面积季节性变化显著[19 ] .以2017年数据为例,2月份水域面积最小,只有745 km2 ; 7月份水域面积最大可达3 085 km2 ,是最小面积的4倍以上[20 ] .本研究样本区域位于赣江河口到都昌大矶山之间(图1 ),样区的总面积约1 500 km2 ,湿地内水道、洲滩、岛屿、内湖和汊港交错,沙滩、泥滩和草滩与水体相互转化,地物特征复杂多变. ...
2021—2022年鄱阳湖10种珍稀候鸟定点观测数据集
1
2022
... 鄱阳湖湿地(N28°22'~29°45',E115°47'~116°45')位于我国江西省北部、长江南岸,为中国第一大淡水湖湿地,湿地植物种类丰富,其中一年生草本87种,多年生草本185种[21 ] .同时鄱阳湖也是众多候鸟迁飞的必经之路,至少有14种濒危候鸟在此越冬,其中白鹤每年来此越冬的数量超过其全球种群数目的98%[22 ] .鄱阳湖湿地处于亚热带暖湿季风气候区,湖水年均温在18 ℃左右,年均降水量为1 620 mm左右,水体面积季节性变化显著[19 ] .以2017年数据为例,2月份水域面积最小,只有745 km2 ; 7月份水域面积最大可达3 085 km2 ,是最小面积的4倍以上[20 ] .本研究样本区域位于赣江河口到都昌大矶山之间(图1 ),样区的总面积约1 500 km2 ,湿地内水道、洲滩、岛屿、内湖和汊港交错,沙滩、泥滩和草滩与水体相互转化,地物特征复杂多变. ...
2021—2022年鄱阳湖10种珍稀候鸟定点观测数据集
1
2022
... 鄱阳湖湿地(N28°22'~29°45',E115°47'~116°45')位于我国江西省北部、长江南岸,为中国第一大淡水湖湿地,湿地植物种类丰富,其中一年生草本87种,多年生草本185种[21 ] .同时鄱阳湖也是众多候鸟迁飞的必经之路,至少有14种濒危候鸟在此越冬,其中白鹤每年来此越冬的数量超过其全球种群数目的98%[22 ] .鄱阳湖湿地处于亚热带暖湿季风气候区,湖水年均温在18 ℃左右,年均降水量为1 620 mm左右,水体面积季节性变化显著[19 ] .以2017年数据为例,2月份水域面积最小,只有745 km2 ; 7月份水域面积最大可达3 085 km2 ,是最小面积的4倍以上[20 ] .本研究样本区域位于赣江河口到都昌大矶山之间(图1 ),样区的总面积约1 500 km2 ,湿地内水道、洲滩、岛屿、内湖和汊港交错,沙滩、泥滩和草滩与水体相互转化,地物特征复杂多变. ...
A novel framework to assess all-round performances of spatiotemporal fusion models
1
2022
... 为了衡量遥感影像的融合质量,时空信息融合算法发展出了许多的精度评价指标,其中包括使用最为广泛的均方根误差(root mean square error,RMSE)、绝对平均差(average absolute difference,AAD)等.Zhu等[23 ] 为了减少多个指标间信息冗余的问题,提出了一种新的评价指标: 在光谱的维度上适宜采用平均差(average difference,AD)和RMSE的组合进行评价; 在空间维度上适宜采用Robert’s Edge(记作Edge)和局部二进制模式(local binary pattern,LBP)的组合进行评价,后两者反映了融合图像在边缘信息和纹理信息的精度.计算方式见表2 .RMSE指标的取值范围为[0,1],值越小代表融合影像的光谱信息误差越小.AD,Edge和LBP指标的取值范围均为[-1,1],绝对值越小越好,负值或正值分别表示对光谱信息的低估或高估和边缘信息、纹理特征的平滑或锐化.评价指标公式如下: ...
Comparative analysis and comprehensive trade-off of four spatiotemporal fusion models for NDVI generation
1
2022
... 在本实验涉及的5种算法中,部分算法在不同时期的最适窗口大小会有变化,改变移动窗口大小对融合影像空间Edge边界和LBP纹理信息有一定的影响.Hu等[24 ] 认为STARFM,ESTARFM和FSDAF等算法调整窗口参数,在农田、森林和草地等地区对NDVI影像融合结果的影响可以忽略不计.但在湿地地区进行窗口大小参数实验时,指标数值的上下波动大约在0.01~0.03之间,需要进一步观察.相关研究表明,不同时空信息融合算法因计算原理的不同,表现出的差异多集中在预测影像的空间方差上[25 ⇓ ⇓ -28 ] ,这与本文的Edge边缘信息指标和LBP纹理信息指标相对应.土地覆盖类型的变化会改变影像方差,而在研究区域内,湿地地物类型的变化主要受水体面积的影响. ...
Assessing the accuracy of blending Landsat-MODIS surface reflectances in two landscapes with contrasting spatial and temporal dynamics:A framework for algorithm selection
1
2013
... 在本实验涉及的5种算法中,部分算法在不同时期的最适窗口大小会有变化,改变移动窗口大小对融合影像空间Edge边界和LBP纹理信息有一定的影响.Hu等[24 ] 认为STARFM,ESTARFM和FSDAF等算法调整窗口参数,在农田、森林和草地等地区对NDVI影像融合结果的影响可以忽略不计.但在湿地地区进行窗口大小参数实验时,指标数值的上下波动大约在0.01~0.03之间,需要进一步观察.相关研究表明,不同时空信息融合算法因计算原理的不同,表现出的差异多集中在预测影像的空间方差上[25 ⇓ ⇓ -28 ] ,这与本文的Edge边缘信息指标和LBP纹理信息指标相对应.土地覆盖类型的变化会改变影像方差,而在研究区域内,湿地地物类型的变化主要受水体面积的影响. ...
Sensitivity of six typical spatiotemporal fusion methods to different influential factors:A comparative study for a normalized difference vegetation index time series reconstruction
1
2021
... 在本实验涉及的5种算法中,部分算法在不同时期的最适窗口大小会有变化,改变移动窗口大小对融合影像空间Edge边界和LBP纹理信息有一定的影响.Hu等[24 ] 认为STARFM,ESTARFM和FSDAF等算法调整窗口参数,在农田、森林和草地等地区对NDVI影像融合结果的影响可以忽略不计.但在湿地地区进行窗口大小参数实验时,指标数值的上下波动大约在0.01~0.03之间,需要进一步观察.相关研究表明,不同时空信息融合算法因计算原理的不同,表现出的差异多集中在预测影像的空间方差上[25 ⇓ ⇓ -28 ] ,这与本文的Edge边缘信息指标和LBP纹理信息指标相对应.土地覆盖类型的变化会改变影像方差,而在研究区域内,湿地地物类型的变化主要受水体面积的影响. ...
3种时空融合算法在洪水监测中的适用性研究
1
2020
... 在本实验涉及的5种算法中,部分算法在不同时期的最适窗口大小会有变化,改变移动窗口大小对融合影像空间Edge边界和LBP纹理信息有一定的影响.Hu等[24 ] 认为STARFM,ESTARFM和FSDAF等算法调整窗口参数,在农田、森林和草地等地区对NDVI影像融合结果的影响可以忽略不计.但在湿地地区进行窗口大小参数实验时,指标数值的上下波动大约在0.01~0.03之间,需要进一步观察.相关研究表明,不同时空信息融合算法因计算原理的不同,表现出的差异多集中在预测影像的空间方差上[25 ⇓ ⇓ -28 ] ,这与本文的Edge边缘信息指标和LBP纹理信息指标相对应.土地覆盖类型的变化会改变影像方差,而在研究区域内,湿地地物类型的变化主要受水体面积的影响. ...
3种时空融合算法在洪水监测中的适用性研究
1
2020
... 在本实验涉及的5种算法中,部分算法在不同时期的最适窗口大小会有变化,改变移动窗口大小对融合影像空间Edge边界和LBP纹理信息有一定的影响.Hu等[24 ] 认为STARFM,ESTARFM和FSDAF等算法调整窗口参数,在农田、森林和草地等地区对NDVI影像融合结果的影响可以忽略不计.但在湿地地区进行窗口大小参数实验时,指标数值的上下波动大约在0.01~0.03之间,需要进一步观察.相关研究表明,不同时空信息融合算法因计算原理的不同,表现出的差异多集中在预测影像的空间方差上[25 ⇓ ⇓ -28 ] ,这与本文的Edge边缘信息指标和LBP纹理信息指标相对应.土地覆盖类型的变化会改变影像方差,而在研究区域内,湿地地物类型的变化主要受水体面积的影响. ...
遥感影像时—空融合的“点”—“线”—“面”质量评价
1
2021
... 在本实验涉及的5种算法中,部分算法在不同时期的最适窗口大小会有变化,改变移动窗口大小对融合影像空间Edge边界和LBP纹理信息有一定的影响.Hu等[24 ] 认为STARFM,ESTARFM和FSDAF等算法调整窗口参数,在农田、森林和草地等地区对NDVI影像融合结果的影响可以忽略不计.但在湿地地区进行窗口大小参数实验时,指标数值的上下波动大约在0.01~0.03之间,需要进一步观察.相关研究表明,不同时空信息融合算法因计算原理的不同,表现出的差异多集中在预测影像的空间方差上[25 ⇓ ⇓ -28 ] ,这与本文的Edge边缘信息指标和LBP纹理信息指标相对应.土地覆盖类型的变化会改变影像方差,而在研究区域内,湿地地物类型的变化主要受水体面积的影响. ...
遥感影像时—空融合的“点”—“线”—“面”质量评价
1
2021
... 在本实验涉及的5种算法中,部分算法在不同时期的最适窗口大小会有变化,改变移动窗口大小对融合影像空间Edge边界和LBP纹理信息有一定的影响.Hu等[24 ] 认为STARFM,ESTARFM和FSDAF等算法调整窗口参数,在农田、森林和草地等地区对NDVI影像融合结果的影响可以忽略不计.但在湿地地区进行窗口大小参数实验时,指标数值的上下波动大约在0.01~0.03之间,需要进一步观察.相关研究表明,不同时空信息融合算法因计算原理的不同,表现出的差异多集中在预测影像的空间方差上[25 ⇓ ⇓ -28 ] ,这与本文的Edge边缘信息指标和LBP纹理信息指标相对应.土地覆盖类型的变化会改变影像方差,而在研究区域内,湿地地物类型的变化主要受水体面积的影响. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}