

0 引言
目前,遥感图像CD领域常见方法可分为基于机器学习的变化检测和基于深度学习的变化检测[11-
在超高分辨率(very high resolution, VHR)图像变化检测领域,决策树作为一种经典的分类方法,已被广泛应用于构建高效的无监督二进制变化检测方法。例如,一种新型的无监督二进制CD方法结合了轻量级卷积神经网络(convolutional netrual netwok, CNN)和决策树,展现出良好的性能[27]。此外,杜俊翰等[28]提出的基于孪生CNN的CD方法,通过多尺度特征提取和注意力机制的结合,显著降低了噪声对检测效果的影响; Wang等[29]进一步探索了Siamese Transformers在CD任务中的潜力,并提出了一个依赖于Swin Transformers的通用模型。
然而,现有深度学习模型尽管可以通过加深网络结构、扩张卷积以及引入各种注意力机制来提升性能,但是在处理VHR图像变化检测任务时仍面临诸多挑战。首先,地物特征对外界环境因素的依赖性较高,导致网络的多粒度性和分类能力不足。这使得基于深度学习的多次CD结果容易受到外界因素的干扰; 其次,深度学习模型对超参数极为敏感,通常需要大量的参数调整才能达到较好的效果; 此外,大型复杂的深度学习模型在处理小型数据集时往往表现不佳,难以充分发挥其性能。
针对现有深度学习模型的不足,深度森林(deep forest)作为一种新兴的深度学习框架应需而生。深度森林继承了决策树的结构和思想,通过级联结构(cascade structure)和多粒度扫描(multi-grained scanning)机制[30],实现了逐层特征提取和表示学习,从而弥补了传统深度学习模型在多粒度性和分类能力上的不足。与深度神经网络相比,深度森林具有更少的超参数,且对超参数设置更为鲁棒,尤其适用于小型数据集任务。此外,深度森林不依赖于反向传播和梯度调整,避免了深度学习模型常见的梯度消失或梯度爆炸问题。因此,深度森林为VHR图像变化检测提供了一种高效且鲁棒的替代方案,特别是在现有深度学习模型难以应对的复杂场景中,展现出巨大的应用潜力。杨惠[31]将深度森林引入合成孔径雷达(synthetic aperture Radar,SAR)成像CD领域,分别对农田、湖泊与海岸线等场景的变化进行检测,均取得了相较于原始方法更为优良的效果; 在对森林CD时,李恒[32]将深度森林方法融入原始CNN,检测结果成功击败了众多传统检测方法及深度学习算法。
基于深度森林在CD领域取得的优异成果,本文提出了基于深度森林子网络的遥感图像变化检测模型(remote sensing image change detection model based on deep forest subnetwork, CDMDF),将深度森林CD模块融入进基础CD模型,在依托底层CD模型优势的前提下,结合深度森林训练方便、效率高以及超参数少等优点,充分利用深度森林多粒度扫描的特点和强大的数据分类能力,实现在小数据集上性能的普遍改进,提高遥感图像CD的准确性。
1 研究方法
提出的CDMDF总体流程图如图1所示。识别遥感图像变化的过程可以看作是一个两阶段操作,包括初步检测和后处理。利用普通的深度学习遥感影像CD模型对变化区域进行初步检测——深度CNN已被证明在遥感图像分析中是有效的,所以本研究的重点是后处理。考虑到额外的深度学习后处理将增加许多额外的问题,例如复杂的参数调整和对小型数据集不友好的大型模型,因此,提出CDMDF作为一种有效的后处理,不仅实现了提高后处理精度的功能,而且避免了参数复杂的问题。在获取数据集困难时,它也适用于小型数据集。
图1
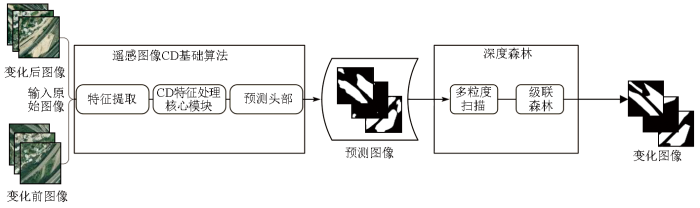
CDMDF基本原理是利用深度森林的优势将深度森林与遥感图像CD基础模型相结合。其中深度森林分为多粒度扫描和级联森林2部分,是从随机森林演变而来的[30]。首先利用基础的深度学习CD模型,得到输入的双时态遥感图像的初步变化预测图。然后将生成的变化图输入到提出的CDMDF中,进行训练以产生最终结果。
1.1 多粒度扫描
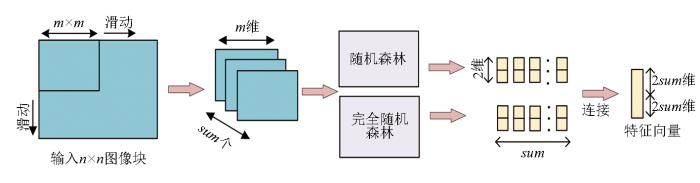
CDMDF中,首先使用3个滑动窗口对预测映射进行多粒度扫描,这些滑动窗口的大小分别设置为默认参数3×3,7×7和11×11。本文采用三层采样,以提取多维样本数据特征,同时在参数选择方面,在多粒度扫描的默认参数的基础上,考虑特征样本的尺度大小,选取这3种尺度的滑动窗口,尽可能充分地利用原始特征。多粒度扫描的示意图如图2所示。具体的扫描过程类似于CNN中卷积核的运动,只是不做卷积运算。与图像数据和序列数据的处理一样,图像数据的扫描方式是从左到右、从上到下,而序列数据只是从上到下。此操作主要放大数据的维度,使得模型更加关注原始数据中各个特征之间的关联。多粒度扫描可以分为2个部分: 特征向量提取和分类。以一层扫描层为例,多粒度扫描使用一个窗口来扫描原始特征,从而得到多个特征向量。假设输入系统的初始图像尺寸为n×n,滑动窗口大小为m×m,滑动间隔为s,扫描可得大小为m×m的sum个特征向量,其中sum可以表示为:
式中int()为取整操作。然后将这些特征向量放入分类器中,其中包括2个森林: 完全随机森林和随机森林。前者,每棵决策树随机选择一个特征进行分裂,决策树不断生长,直到节点具有相同的分类结果; 在后者中,决策树根据基尼值选择最优特征进行分割。当深度森林中存在2种类型的随机森林,即随机森林和完全随机森林时,其性能会更好[33]。在涉及向量二元分类的CD中,每个森林生成一个代表类别的二维向量,2个森林输出一对二维类向量,而特征向量为sum个,因此经过2个森林就可以得到2组sum个二维类向量。再将这些类向量拼接在一起,得到一个4 sum长度的一维向量,即变化特征向量。最后把3层森林的结果拼接在一起得到多粒度扫描的输出。
图2
多粒度扫描作为初步CD的输出与级联森林之间的连接子网络,从上到下、从左到右对深度学习的输出进行处理,进一步关注特征之间的相关性,从而增强后续级联森林的分类效果。实验中每种类型的随机森林设置了100个决策树,决策树在生长到叶节点后停止生长。值得注意的是,多粒度扫描只是特征向量提取和分类的一个阶段,目的是获得更丰富的特征关系向量,为后续的级联森林提供强大的特征预处理基础。
1.2 级联森林
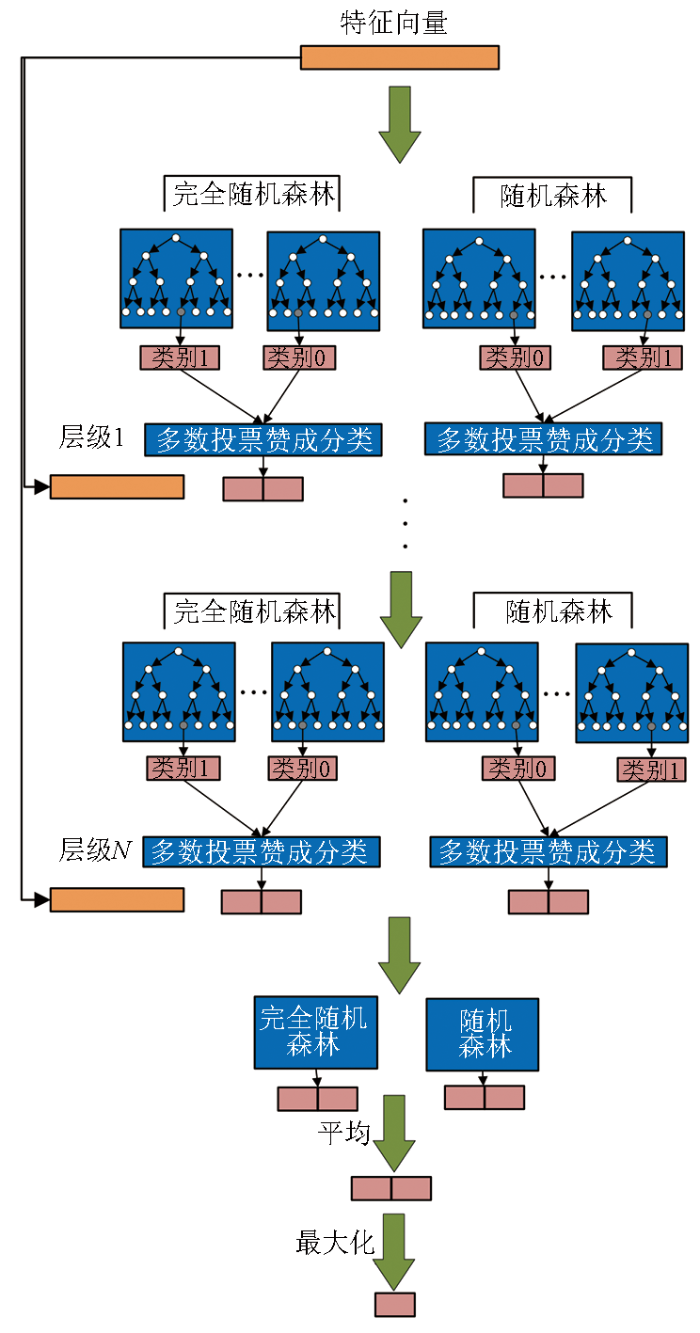
多粒度扫描的结果进入N层级联森林进行分类处理。级联森林的示意图如图3所示。每个级联层包含2个随机森林,每个随机森林包括100个决策树,每个决策树得到一个二元分类结果,这100个结果被投票决定分类的结果,因此,每个级联层输出2个二维类向量; 然后,连接输入特征向量的类向量用于训练次级联森林; 最后,重复该过程,直到最终结果可以收敛。需要注意的是,在扩展一个新的级后,整个级联的性能将在验证集上进行估计,如果没有显著的性能增益,训练过程将终止。因此,级联中级的数量是自动确定的。与模型的复杂性固定的大多数深度神经网络相反,深度森林能够适当地通过终止训练来决定其模型的复杂度。这使得深度森林能够适用于不同规模的训练数据,而不局限于大规模训练数据。经过最后一层的级联处理后,对每个森林输出中的同一类进行平均,然后取最大值对应的类作为最后一个分类器的输出。
图3
CDMDF中使用的评估方法是k倍交叉验证。交叉验证方法可以更好地展示其在小规模数据集上的优势,这也是深度森林在小尺度数据集上具有更明显优势的原因之一。在级联随机森林的训练过程中,将在验证集上估计整个级联的性能。如果没有显著的性能提升,训练过程将终止。更具体地说,级联森林不是端到端的训练。每个层的级联接收上一层处理的特征信息,并将处理结果(类向量)输出到下一层。从每个森林中学习后,将获得预测的类分布,然后,计算平均值并将其与先前的原始特征连接起来,作为下一层的输入。展开一层后,可以在验证集上测试整个级联结构的性能。如果没有明显的改进,训练过程将终止,因此可以自动确定层数。需要解释的是,深度森林的作用不止在于分类和回归。随机森林是树的集合,而单决策树对数据变化很敏感,很容易过度拟合某些噪声,因此,只有一棵树的随机森林也可能会遇到过拟合。决策树也是如此,当将决策树逐个添加到随机森林中时,过拟合的趋势会减少,但是,误差通常不会变为0; 添加更多树后,误差方差将接近0,但偏差不会。这代表随机森林中的树越多越好。因此,在此基础上进化的深度森林不易出现过拟合问题,这也是CDMDF的优势之一,也就是该模型具有高度自适应性,对参数不敏感。级联森林是通过在多个级联层中集成随机森林获得的,是多粒度扫描的后续阶段,它们可以对多粒度扫描中的特征向量进行分类,但不能用作二进制图像分类的单独后处理模块。本文还利用深度森林的分类效应,对最初检测到的二元图像进行了进一步处理,而不是直接对双时态遥感图像进行处理。
2 结果与分析
2.1 实验设置
图4
图5
为了确认所提出的CDMDF的效果,将CDMDF添加到6种现有方法中进行比较,分别为: FC-EF,FC-Siam-conc,FC-Siam-diff,SNUnet,DTDSCN和STANet。这些方法在融合CDMDF之后分别重命名为FC-EF_DF,FC-Siam-conc_DF,FC-Siam-diff_DF,SNUnet_DF,DTCDSCN_DF和STANet_DF。本文引入了3个客观的评价指标来衡量每个检测结果与真实值的相似度,包括准确率、召回率和F1分数。准确率表示正确预测的正样本与实际预测的正样本的比例,召回率表示正确预测的正样本与正样本的比例,F1分数是准确率和召回率的调和平均值,可以更准确地表示分类的有效性。准确率越高表示误报率越低,召回率越高表示漏报率越低,F1分数值为准确率与召回率的谐波平均值。此外,在模型中使用了交叉熵损失,这个损失函数的选择也将在讨论中进行演示。计算公式为:
式中: P为准确率; R为召回率; TP为真实值,表示正确预测的变化像素数; FP为误报,表示预测为已变化实际未变化的像素数; FN为假阴性,表示预测为未变化实际已变化像素数。环境配置默认为Python3.6.0,torch版本为1.10.2,torchvision版本为0.11.3。
2.2 实验结果
图6
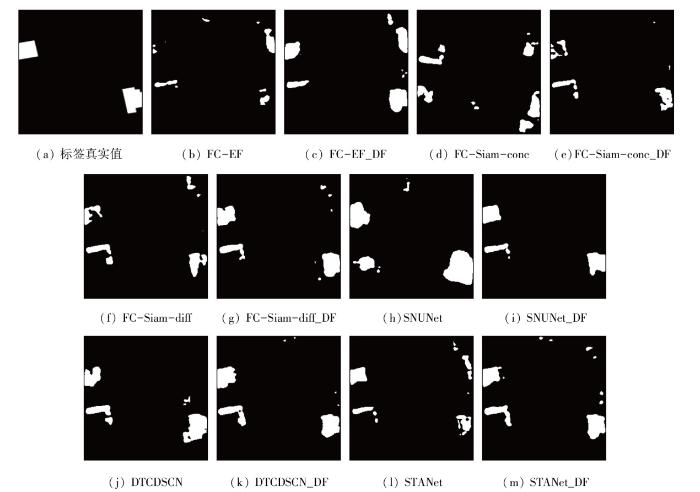
图6
LEVIR-CD测试集上不同方法的结果
Fig.6
Results of the different methods on the LEVIR-CD test sets
图7
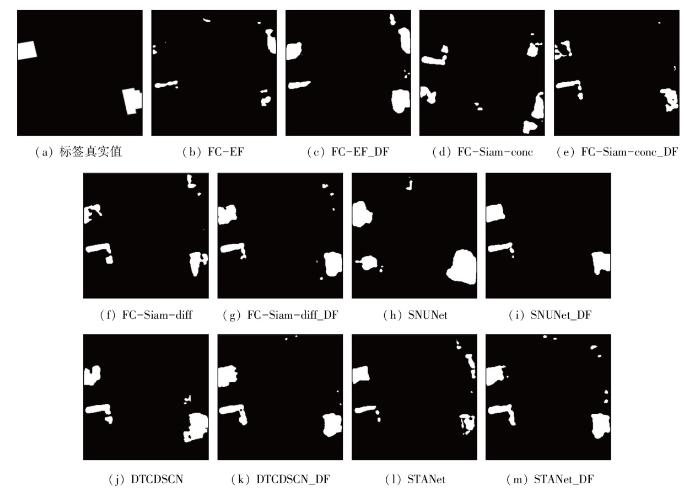
图7
SYSU-CD测试集上不同方法的结果
Fig.7
Results of the different methods on the SYSU-CD test sets
表1 2个数据集上各方法的对比
Tab.1
| 方法 | LEVIR-CD | SYSU-CD | ||||
|---|---|---|---|---|---|---|
| 准确率 | 召回率 | F1 | 准确率 | 召回率 | F1 | |
| FC-EF | 0.922 | 0.773 | 0.841 | 0.721 | 0.902 | 0.801 |
| FC-EF_DF | 0.942 | 0.966 | 0.954 | 0.804 | 0.827 | 0.815 |
| FC-Siam-conc | 0.910 | 0.850 | 0.879 | 0.695 | 0.831 | 0.757 |
| FC-Siam-conc_DF | 0.927 | 0.935 | 0.930 | 0.783 | 0.853 | 0.817 |
| FC-Siam-diff | 0.914 | 0.861 | 0.887 | 0.991 | 0.632 | 0.772 |
| FC-Siam-diff_DF | 0.931 | 0.952 | 0.941 | 0.988 | 0.805 | 0.887 |
| SNUnet | 0.864 | 0.947 | 0.904 | 0.689 | 0.718 | 0.703 |
| SNUnet_DF | 0.939 | 0.933 | 0.936 | 0.855 | 0.926 | 0.889 |
| DTCDSCN | 0.883 | 0.904 | 0.893 | 0.810 | 0.857 | 0.833 |
| DTCDSCN_DF | 0.918 | 0.887 | 0.902 | 0.807 | 0.869 | 0.837 |
| STANet | 0.918 | 0.833 | 0.873 | 0.792 | 0.838 | 0.814 |
| STANet_DF | 0.924 | 0.867 | 0.894 | 0.903 | 0.806 | 0.852 |
由于CDMDF由基本CD模型和深度森林后处理子网络2部分组成,因此模型的整体性能由这2部分决定。虽然是一个后处理子网络,但不像形态学处理那样对单个图像数据进行处理,而是对整个数据的平均值进行处理,这更好地反映了所提模型的有效性。在规模相对较小的LEVIR-CD数据集中,性能的提升尤其明显,表明了该子网络在数据稀缺情况下的有效性。其中,对于FC-EF此类完全使用卷积网络没有后处理结构的模型来说,额外的后处理子网络CDMDF的效果更加明显,且FC-EF模型相对于其他模型来说本身在图像处理上就更加直接,而CDMDF的加入让FC-EF对LEVIR类小型数据集来说,在原本不占优势的数据集需求方面有了很大的缓解。CDMDF使用多粒度扫描和级联森林机制,能够捕获数据中复杂的模式和关系,这对于准确的变化检测至关重要。
3 讨论
3.1 损失函数的影响
本文设置了4组不同的损失函数进行比较研究,并在数据集上测试了FC-EF_DF的性能。4种损失函数包括: 交叉熵损失、均方误差损失、平方损失和焦点损失。将这4个损失函数应用于FC-EF_DF模型并在LEVIR-CD数据集上进行一组全面的测试,目的是确定哪种损失函数将在CD领域产生最稳健和最准确的结果。
表2提供的实验数据表明,交叉熵损失在优化F1分数方面特别有效。交叉熵损失的功效源于其量化2个概率分布之间方差的能力,这一属性最大限度地减少了与模型无关的预设的干扰,使其成为广泛的机器学习框架的合适选择。与均方误差损失函数和平方损失函数相比,交叉熵衡量的是2个分布之间的差异,对模型“不可知”假设的影响很小,因而能够更好地适应各种机器学习模型,对于机器学习任务非常有用。焦点损失是二元分类的交叉熵损失函数,比交叉熵损失稍差,当样本不平衡时,焦点损失可能比交叉熵损失更好。因此,选择交叉熵作为损失函数。
表2 不同损失函数的影响
Tab.2
| 损失函数 | 准确率 | 召回率 | F1 |
|---|---|---|---|
| 交叉熵损失 | 0.942 | 0.966 | 0.954 |
| 均方误差损失 | 0.902 | 0.979 | 0.939 |
| 平方损失 | 0.948 | 0.920 | 0.934 |
| 焦点损失 | 0.946 | 0.951 | 0.948 |
3.2 样本大小的影响
本文设计了一个使用小样本数据的实验来测试CDMDF在小样本下的性能。通过分割LEVIR-CD数据集获得数据集,随机选择200个数据集的子集,其中120个分配用于训练阶段,其余80个用于评估和验证。使用FC-EF及FC-EF_DF作为该实验的说明性示例,图8展示了实验获得的相应结果。同时,利用6个基本模型和相应的CDMDF增强模型对大小数据集进行对比实验,数据指标结果见表3。可以看出,尽管用于训练的样本数据大小有限,但引入的CDMDF在CD任务中表现出了良好的性能,准确率等指标可提升10%左右。这是因为深度森林架构擅长通过动态调整模型的深度来处理不同的数据量。因此,即使训练数据集相对较小,CDMDF也能够通过关注数据中最相关的特征和关系来实现高精度的预测。CDMDF的这一特性在数据采集成本高昂且耗时的遥感图像分析领域尤其有价值。通过有效地管理模型复杂性和数据量之间的权衡,CDMDF为小数据集的变化检测任务提供了解决方案。
图8
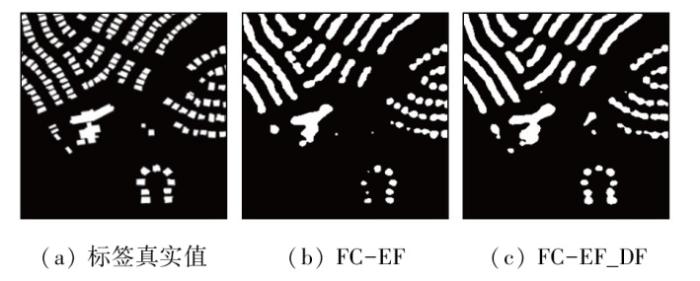
表3 数据集的大小对实验结果的影响
Tab.3
| 方法 | 原始数据集 | 小数据集 | ||||
|---|---|---|---|---|---|---|
| 准确率 | 召回率 | F1 | 准确率 | 召回率 | F1 | |
| FC-EF | 0.922 | 0.773 | 0.841 | 0.817 | 0.742 | 0.778 |
| FC-EF_DF | 0.942 | 0.966 | 0.954 | 0.920 | 0.931 | 0.925 |
| FC-Siam-conc | 0.910 | 0.850 | 0.879 | 0.883 | 0.752 | 0.812 |
| FC-Siam-conc_DF | 0.927 | 0.935 | 0.930 | 0.920 | 0.844 | 0.880 |
| FC-Siam-diff | 0.914 | 0.861 | 0.887 | 0.835 | 0.786 | 0.810 |
| FC-Siam-diff_DF | 0.931 | 0.952 | 0.941 | 0.897 | 0.904 | 0.900 |
| SNUnet | 0.864 | 0.947 | 0.904 | 0.833 | 0.898 | 0.864 |
| SNUnet_DF | 0.939 | 0.933 | 0.936 | 0.879 | 0.903 | 0.891 |
| DTCDSCN | 0.883 | 0.904 | 0.893 | 0.796 | 0.847 | 0.821 |
| DTCDSCN_DF | 0.918 | 0.887 | 0.902 | 0.880 | 0.862 | 0.871 |
| STANet | 0.918 | 0.833 | 0.873 | 0.801 | 0.799 | 0.799 |
| STANet_DF | 0.924 | 0.867 | 0.894 | 0.877 | 0.830 | 0.853 |
3.3 消融实验
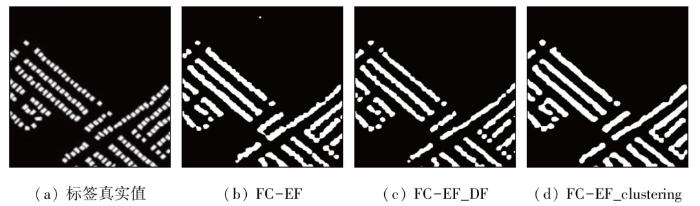
CDMDF的功能在于后处理,它进一步实现了通过深度森林的特征提取和分类。为了验证这种后处理方法的有效性,将其与聚类算法,如K-means算法进行比较,并将该算法记作FC-EF_clustering。FC-EF_clustering的原理是: 首先设置k个类别,从种群中随机选择k个样本作为聚类中心,然后遍历所有样本点,将所有样本点分类为k个类别(根据最短距离),更新k个样本的样本中心,然后重新划分所有样本点。停止条件可以设置为样本变化幅度不显著的情况,或者2个损失函数没有显着变化的情况。由于处理的是二进制图像,因而使用二进制聚类算法。将FC-EF模型和FC-EF_DF与FC-EF_clustering进行了比较,结果如图9所示。将图9(d)的细节之处与图9(a)—(c)细节之处对比可以看出,二进制聚类作为一种机器学习算法,其有效性并不稳定,因为聚类结果在很大程度上受初始聚类中心选择的影响。因此,参数的选择会导致有偏差的聚类结果,而这些结果并不普遍。另一方面,聚类算法在迭代过程中采用贪婪策略,试图在每个步骤中找到当前的最佳解决方案。但是,这种策略可能会导致算法陷入局部最优,无法实现全局最优。需要注意的是,本文目标不仅要提取更改区域,还要准确划分已更改和未更改的区域,即更清楚地定义更改区域的边缘。从图中可以看出,聚类算法大多对变化区域进行模糊处理,甚至直接将相邻的变化区域划分为同一个区块,这与本文的检测目标并不一致。
图9
此外,笔者用形态学处理替换了后处理中的深度森林模块,并尝试包含打开和关闭操作,以及对二进制结果图像的形态学梯度处理。结果表明,额外的形态学处理可以消除一些细节,如孤立点、精细连接和毛刺,但形态学处理需要人工调整方法和参数,内核的大小决定了优化结果,因此形态学处理不能作为一个单独的后处理模块嵌入到基本CD模型中。
3.4 运行成本
由于增加了额外的子网络,不可避免地对系统复杂度和运行时间产生影响,为了测试方法的复杂度,记录LEVIR-CD数据集在不同方法上的运行时间的变化,结果如表4所示。
表4 深度森林对运行时间的影响
Tab.4
| 方法 | 平均运行时间 | 增加的时间 |
|---|---|---|
| FC-EF | 10.08 | 2.12 |
| FC-EF_DF | 12.20 | |
| FC-Siam-conc | 10.53 | 2.28 |
| FC-Siam-conc_DF | 12.81 | |
| FC-Siam-diff | 9.41 | 2.06 |
| FC-Siam-diff_DF | 11.47 | |
| SNUnet | 10.49 | 2.35 |
| SNUnet_DF | 12.84 | |
| DTCDSCN | 16.19 | 2.26 |
| DTCDSCN_DF | 18.45 |
显然,建立在现有CD方法基础上的新子网络的集成有助于提高检测过程的精度,但这种准确性的提高并不是没有代价的。子网络的引入需要额外的计算资源和流程,反过来又导致整体处理时间的延长。综合考虑检测结果的质量和精度,这种方法符合实现更准确、更有效的CD系统的更广泛目标,即使这意味着需要增加计算成本。计算效率和检测精度之间的平衡是此类技术的开发和部署的关键考虑因素,在这种情况下,提高精度的好处超过了与增加处理时间相关的成本。因此,计算成本的增加是一个不可避免的问题,研究者也希望更深入地挖掘轻量级的后处理网络,以减轻模型的复杂性。
4 结论
本文介绍了一个遥感图像CD通用深度森林子网络CDMDF。CDMDF框架主要由2部分组成: 基本变化检测模型和深度森林后处理子网络。后处理子网络对变化检测基础模型的初始结果进行检测,不仅利用了深度森林的分类作用,而且缓解了基本模型对参数敏感、对数据集要求高的问题。
将6种传统CD算法和相应集成了深度森林模块的改进算法分别在LEVIR-CD测试集和SYSU-CD测试集进行测试,结果显示: 集成了深度森林模块的改进算法可以有效改进标签的预测效果,并在精度、召回率和F1分数上均有所增加,显著提升了可视化效果。此外,在小数据集上进一步验证的实验结果表明,CDMDF对准确率等指标可提升10%左右,为小数据集CD任务提供了一种新的思路。
CDMDF的局限性在于会增加运行成本且不适合于大型数据集。因此,接下来将致力于轻量化CDMDF的研究,以更好地平衡计算效率和检测精度,并尝试将CDMDF推广至大型数据集。
参考文献
Review article digital change detection techniques using remotely-sensed data
[J].DOI:10.1080/01431168908903939 URL [本文引用: 1]
Spatial and spectral image fusion using sparse matrix factorization
[J].DOI:10.1109/TGRS.2013.2253612 URL
Super-resolution mapping based on spatial-spectral correlation for spectral imagery
[J].DOI:10.1109/TGRS.36 URL [本文引用: 1]
Spatio-temporal spectral unmixing of time-series images
[J].
Multiresolution analysis based on dual-scale regression for pansharpening
[J].
Building change detection in multitemporal very high resolution SAR images
[J].DOI:10.1109/TGRS.2014.2363548 URL [本文引用: 1]
Building change detection from multitemporal high-resolution remotely sensed images based on a morphological building index
[J].DOI:10.1109/JSTARS.4609443 URL [本文引用: 1]
A PolSAR change detection index based on neighborhood information for flood mapping
[J].
DOI:10.3390/rs11161854
URL
[本文引用: 1]

Change detection using Remote Sensing (RS) techniques is valuable in numerous applications, including environmental management and hazard monitoring. Synthetic Aperture Radar (SAR) images have proven to be even more effective in this regard because of their all-weather, day and night acquisition capabilities. In this study, a polarimetric index based on the ratio of span (total power) values was introduced, in which neighbourhood information was considered. The role of the central pixel and its neighbourhood was adjusted using a weight parameter. The proposed index was applied to detect flooded areas in Dongting Lake, Hunan, China, and was then compared with the Wishart Maximum Likelihood Ratio (MLR) test. Results demonstrated that although the proposed index and the Wishart MLR test yielded similar accuracies (accuracy of 94% and 93%, and Kappa Coefficients of 0.82 and 0.86, respectively), inclusion of neighbourhood information in the proposed index not only increased the connectedness and decreased the noise associated with the objects within the produced map, but also increased the consistency and confidence of the results.
Spatiotemporal reflectance fusion via sparse representation
[J].DOI:10.1109/TGRS.2012.2186638 URL [本文引用: 1]
Deep convolutional neural network framework for subpixel mapping
[J].DOI:10.1109/TGRS.2020.3032475 URL [本文引用: 1]
Change detection in synthetic aperture Radar images based on deep neural networks
[J].
DOI:10.1109/TNNLS.2015.2435783
PMID:26068879
[本文引用: 1]
This paper presents a novel change detection approach for synthetic aperture radar images based on deep learning. The approach accomplishes the detection of the changed and unchanged areas by designing a deep neural network. The main guideline is to produce a change detection map directly from two images with the trained deep neural network. The method can omit the process of generating a difference image (DI) that shows difference degrees between multitemporal synthetic aperture radar images. Thus, it can avoid the effect of the DI on the change detection results. The learning algorithm for deep architectures includes unsupervised feature learning and supervised fine-tuning to complete classification. The unsupervised feature learning aims at learning the representation of the relationships between the two images. In addition, the supervised fine-tuning aims at learning the concepts of the changed and unchanged pixels. Experiments on real data sets and theoretical analysis indicate the advantages, feasibility, and potential of the proposed method. Moreover, based on the results achieved by various traditional algorithms, respectively, deep learning can further improve the detection performance.
地理国情综合指数及其计算模型研究
[J].
Composite index and calculation model for national geographical state
[J].
论地理国情监测的技术支撑
[J].
Discussion on key technologies of geographic national conditions monitoring
[J].
Multi-decadal mangrove forest change detection and prediction in Honduras,Central America,with Landsat imagery and a Markov chain model
[J].
DOI:10.3390/rs5126408
URL
[本文引用: 1]
Mangrove forests play an important role in providing ecological and socioeconomic services for human society. Coastal development, which converts mangrove forests to other land uses, has often ignored the services that mangrove may provide, leading to irreversible environmental degradation. Monitoring the spatiotemporal distribution of mangrove forests is thus critical for natural resources management of mangrove ecosystems. This study investigates spatiotemporal changes in Honduran mangrove forests using Landsat imagery during the periods 1985–1996, 1996–2002, and 2002–2013. The future trend of mangrove forest changes was projected by a Markov chain model to support decision-making for coastal management. The remote sensing data were processed through three main steps: (1) data pre-processing to correct geometric errors between the Landsat imageries and to perform reflectance normalization; (2) image classification with the unsupervised Otsu’s method and change detection; and (3) mangrove change projection using a Markov chain model. Validation of the unsupervised Otsu’s method was made by comparing the classification results with the ground reference data in 2002, which yielded satisfactory agreement with an overall accuracy of 91.1% and Kappa coefficient of 0.82. When examining mangrove changes from 1985 to 2013, approximately 11.9% of the mangrove forests were transformed to other land uses, especially shrimp farming, while little effort (3.9%) was applied for mangrove rehabilitation during this 28-year period. Changes in the extent of mangrove forests were further projected until 2020, indicating that the area of mangrove forests could be continuously reduced by 1,200 ha from 2013 (approximately 36,700 ha) to 2020 (approximately 35,500 ha). Institutional interventions should be taken for sustainable management of mangrove ecosystems in this coastal region.
Hyperspectral image classification using attention-based bidirectional long short-term memory network
[J].
Hyperspectral imaging:A review on UAV-based sensors,data processing and applications for agriculture and forestry
[J].
DOI:10.3390/rs9111110
URL
[本文引用: 1]
Traditional imagery—provided, for example, by RGB and/or NIR sensors—has proven to be useful in many agroforestry applications. However, it lacks the spectral range and precision to profile materials and organisms that only hyperspectral sensors can provide. This kind of high-resolution spectroscopy was firstly used in satellites and later in manned aircraft, which are significantly expensive platforms and extremely restrictive due to availability limitations and/or complex logistics. More recently, UAS have emerged as a very popular and cost-effective remote sensing technology, composed of aerial platforms capable of carrying small-sized and lightweight sensors. Meanwhile, hyperspectral technology developments have been consistently resulting in smaller and lighter sensors that can currently be integrated in UAS for either scientific or commercial purposes. The hyperspectral sensors’ ability for measuring hundreds of bands raises complexity when considering the sheer quantity of acquired data, whose usefulness depends on both calibration and corrective tasks occurring in pre- and post-flight stages. Further steps regarding hyperspectral data processing must be performed towards the retrieval of relevant information, which provides the true benefits for assertive interventions in agricultural crops and forested areas. Considering the aforementioned topics and the goal of providing a global view focused on hyperspectral-based remote sensing supported by UAV platforms, a survey including hyperspectral sensors, inherent data processing and applications focusing both on agriculture and forestry—wherein the combination of UAV and hyperspectral sensors plays a center role—is presented in this paper. Firstly, the advantages of hyperspectral data over RGB imagery and multispectral data are highlighted. Then, hyperspectral acquisition devices are addressed, including sensor types, acquisition modes and UAV-compatible sensors that can be used for both research and commercial purposes. Pre-flight operations and post-flight pre-processing are pointed out as necessary to ensure the usefulness of hyperspectral data for further processing towards the retrieval of conclusive information. With the goal of simplifying hyperspectral data processing—by isolating the common user from the processes’ mathematical complexity—several available toolboxes that allow a direct access to level-one hyperspectral data are presented. Moreover, research works focusing the symbiosis between UAV-hyperspectral for agriculture and forestry applications are reviewed, just before the paper’s conclusions.
加入多时相纹理的遥感变化检测
[J].
Remote sensing change detection by inclusion of multitemporal texture
[J].
Video Google:A text retrieval approach to object matching in videos
[C]//
Change vector analysis:An approach for detecting forest changes with Landsat
[C]//
方向矢量法在城市土地利用变化检测中的应用
[J].
DOI:10.3969/j.issn.1000-3428.2008.02.085
[本文引用: 1]
城市土地利用变化检测为城市规划和管理提供有用信息。但是目前很多变化检测方法都离不开人工干预,其结果在一定程度上依赖于人的经验。方向矢量法是将多时相遥感数据中不同地物类型间的光谱差异利用方向矢量反映在多维空间中,进而建立类型转换模型。该方法避免了依赖人的经验所带来的不便和误差,并且简单、直观、易操作。通过对北京奥运村地区高分辨率遥感影像的检测,分析了方向矢量检测法在城市土地利用变化检测中的应用。
Application of direction-vector analysis in change detection of urban land-use
[J].DOI:10.1007/s00366-017-0537-7 URL [本文引用: 1]
SNUNet-CD:A densely connected Siamese network for change detection of VHR images
[J].
Siamese NestedUNet networks for change detection of high resolution satellite image
[C]//
Fully convolutional Siamese networks for change detection
[C]//
Building change detection for remote sensing images using a dual-task constrained deep Siamese convolutional network model
[J].
DOI:10.1109/LGRS.2020.2988032
[本文引用: 1]
In recent years, building change detection methods have made great progress by introducing deep learning, but they still suffer from the problem of the extracted features not being discriminative enough, resulting in incomplete regions and irregular boundaries. To tackle this problem, we propose a dual-task constrained deep Siamese convolutional network (DTCDSCN) model, which contains three subnetworks: a change detection network and two semantic segmentation networks. DTCDSCN can accomplish both change detection and semantic segmentation at the same time, which can help to learn more discriminative object-level features and obtain a complete change detection map. Furthermore, we introduce a dual attention module (DAM) to exploit the interdependencies between channels and spatial positions, which improves the feature representation. We also improve the focal loss function to suppress the sample imbalance problem. The experimental results obtained with the WHU building data set show that the proposed method is effective for building change detection and achieves state-of-the-art performance in terms of four metrics on the WHU building data set: precision, recall, F1-score, and intersection over union.
A spatial-temporal attention-based method and a new dataset for remote sensing image change detection
[J].
DOI:10.3390/rs12101662
URL
[本文引用: 1]
Remote sensing image change detection (CD) is done to identify desired significant changes between bitemporal images. Given two co-registered images taken at different times, the illumination variations and misregistration errors overwhelm the real object changes. Exploring the relationships among different spatial–temporal pixels may improve the performances of CD methods. In our work, we propose a novel Siamese-based spatial–temporal attention neural network. In contrast to previous methods that separately encode the bitemporal images without referring to any useful spatial–temporal dependency, we design a CD self-attention mechanism to model the spatial–temporal relationships. We integrate a new CD self-attention module in the procedure of feature extraction. Our self-attention module calculates the attention weights between any two pixels at different times and positions and uses them to generate more discriminative features. Considering that the object may have different scales, we partition the image into multi-scale subregions and introduce the self-attention in each subregion. In this way, we could capture spatial–temporal dependencies at various scales, thereby generating better representations to accommodate objects of various sizes. We also introduce a CD dataset LEVIR-CD, which is two orders of magnitude larger than other public datasets of this field. LEVIR-CD consists of a large set of bitemporal Google Earth images, with 637 image pairs (1024 × 1024) and over 31 k independently labeled change instances. Our proposed attention module improves the F1-score of our baseline model from 83.9 to 87.3 with acceptable computational overhead. Experimental results on a public remote sensing image CD dataset show our method outperforms several other state-of-the-art methods.
A novel unsupervised binary change detection method for VHR optical remote sensing imagery over urban areas
[J].
基于多尺度注意力特征与孪生判别的遥感影像变化检测及其抗噪性研究
[J].
Change detection of remote sensing image based on Siamese multi-scale attention network and its anti-noise ability research
[J].
STCD:Efficient Siamese transformers-based change detection method for remote sensing images
[J].DOI:10.1080/10095020.2022.2157762 URL [本文引用: 1]
Deep forest
[J].
DOI:10.1093/nsr/nwy108
URL
[本文引用: 2]
Current deep-learning models are mostly built upon neural networks, i.e. multiple layers of parameterized differentiable non-linear modules that can be trained by backpropagation. In this paper, we explore the possibility of building deep models based on non-differentiable modules such as decision trees. After a discussion about the mystery behind deep neural networks, particularly by contrasting them with shallow neural networks and traditional machine-learning techniques such as decision trees and boosting machines, we conjecture that the success of deep neural networks owes much to three characteristics, i.e. layer-by-layer processing, in-model feature transformation and sufficient model complexity. On one hand, our conjecture may offer inspiration for theoretical understanding of deep learning; on the other hand, to verify the conjecture, we propose an approach that generates deep forest holding these characteristics. This is a decision-tree ensemble approach, with fewer hyper-parameters than deep neural networks, and its model complexity can be automatically determined in a data-dependent way. Experiments show that its performance is quite robust to hyper-parameter settings, such that in most cases, even across different data from different domains, it is able to achieve excellent performance by using the same default setting. This study opens the door to deep learning based on non-differentiable modules without gradient-based adjustment, and exhibits the possibility of constructing deep models without backpropagation.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}