0 引言
在过去几十年里,遥感变化检测方法被广泛应用于各种遥感领域(如林业、农业、城市和灾害监测)[1 7] 。根据遥感变化检测的目的,可以将其分为2类:二元变化检测(目的是区分变化类和无变化类)和多元变化检测(目的是区分不同类型的变化)[8 ] 。与二元变化检测相比,多元变化检测在处理多地物影像时,变化类型数量的增加会提高计算复杂性和变化类型估计难度[9 ] 。
在当前的遥感变化检测方法中,分类后变化检测(post-classification comparison,PCC)方法通过对不同时相的遥感图像进行分类来识别变化信息,但易受到累积分类误差的影响。而变化向量分析法(change vector analysis,CVA)[10 -11 ] 由于对图像的辐射校正要求严格,且易受到多种干扰因素的影响,应用受到了限制。为克服这些限制,Chen等[12 ] 提出了后验概率空间变化向量分析法(change vector analysis in posterior probability space,CVAPS),它放宽了对图像辐射校正的要求,并具有更高的变化检测性能。并且,CVAPS可以根据后验概率变化向量的方向,区分不同类型的变化,实现多元变化检测。然而,CVAPS利用支持向量机(support vector machine,SVM)[13 -14 ] 来估计遥感图像像素的后验概率向量,易受到遥感图像中同物异谱、异物同谱、混合像元等因素的影响,从而难以准确估计复杂像元后验概率向量的强度和方向,并影响了其后多元变化检测的精度[15 ] 。为解决这一问题,李轶鲲等[16 18] 结合模糊C均值聚类(fuzzy C-means,FCM)和上下文敏感的贝叶斯网络(context-sensitive Bayesian network,CSBN),提出了FCM-CSBN-CVAPS方法。该方法通过建立像素与多种地物之间的随机链接,能够有效处理同物异谱、异物同谱及混合像元等问题,从而提高了变化检测的准确性和鲁棒性。因此本文基于CSBN估计后验概率变化向量,实现了更为精确的多元变化检测。在多元变化检测方法中,SVM-CVAPS根据后验概率变化向量与标准变化向量的最大相关程度(maximum correlation,MC)来判断变化类型[15 ] 。然而,较多的地物类型会生成过多的标准变化向量,这些标准变化向量互相干扰,大大降低了多元变化检测的精度。
因此,本文提出了一种多模式结合的多元变化检测算法FCM-CSBN-CVAPS-AT。该方法首先使用FCM捕获遥感影像中的信号类,再通过CSBN基于像素级空间关系建立每个像素和地物类型间多对多的随机链接,并利用CVAPS模型计算得到每个像素的后验概率变化向量。在此基础上,提出一种角度阈值(angle thresholding,AT)法。AT法通过计算像素后验概率变化向量与某一标准变化向量的夹角,当夹角小于一定阈值时,则判定该像素为该标准变化向量所代表的变化类型。由于AT法不需要在不同标准变化向量间进行比较,有效地避免了标准变化向量互相干扰的问题。实验证明,与比较算法相比,本文算法取得了更高的多元变化检测精度,且不易受算法参数的影响,具有一定的实用价值。
1 研究方法
高分辨率遥感(high resolution remote sensing,HRRS)影像普遍存在的混合像元现象往往影响变化检测性能。因此,需要使用FCM算法将像素分解为多个信号类。与一般解混方法检测到的端元不同,信号类是具有相似光谱特征的像素簇。此外,引入空间信息可以有效地处理HRRS影像的光谱可变性,减轻不确定性。因此,CSBN通过引入像素级空间信息,建立信号对和地物类型之间的多对多随机链接。一方面,CSBN可以将不同的信号类(即不同的光谱)链接到同一种地物类型,以处理光谱可变性;另一方面,CSBN可以根据空间上下文信息将同一信号类链接到不同的地物类型,针对光谱和地物间一对多的关系建模。
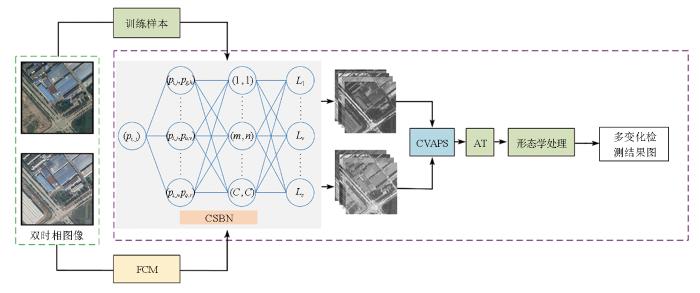
基于CSBN,本文提出了一种多模式结合的变化检测算法(FCM-CSBN-CVAPS-AT),其总体流程如图1 所示。首先,通过FCM提取两时相遥感影像中的信号类,并通过CSBN估计双时相遥感图像的像素级后验概率向量,并在此基础上使用CVAPS生成后验概率变化强度图;其次,使用Otsu法[19 ] 计算变化阈值,生成变化二值图,再经过形态学处理,去除细小相斑和孔洞,生成优化后的变化二值图;最后,针对变化区域,利用AT法计算像素后验概率变化向量与某一标准变化向量的夹角,当夹角小于一定阈值,则判定该像素为标准变化向量所代表的变化类型,从而实现HRRS影像的多元变化检测。由于FCM-CSBN-CVAPS将空间信息融入后验概率向量的估计过程,并使用后验概率向量而不是使用分类图进行变化检测,因此,提出的算法对累积分类误差更具鲁棒性。
图1
图1
FCM-CSBN-CVAPS-AT算法流程图
Fig.1
Flowchart of FCM-CSBN-CVAPS-AT algorithm
1.1 CSBN模型
CSBN可以将空间信息与后验概率估计结合,因此本文使用CSBN来进行像素后验概率估计。然而,由于混合像元和累积聚类误差的影响,K-means无法有效捕获遥感图像中的信号类,大大地限制了变化检测性能。因此,本文改进了CSBN模型,将其与FCM相结合,在像素后验概率估计和模型训练阶段引入像素级空间信息。
本文构建了4层CSBN模型以计算像素pi , j Lv 的后验概率P (Lv |pi , j 图1 )。第1层为遥感图像的像素pi , j pi , j pg , h pg , h pi , j Ni , j ωm ,ωn ),其中,m 和n 是信号类ωm 和ωn 的索引;第4层为遥感图像中地物类型。P (Lv |pi , j
(1) P (Lv |pi , j P (Lv )${\sum }_{{p}_{g,h}\in {N}_{i,j}}^{}$ P ((pi , j pg , h pi , j ${\sum }_{1\le m,n\le C}^{}\frac{P((m,n)|{L}_{v})P((m,n)|({p}_{i,j},{p}_{g,h}))}{P(m,n)}$ ,
式中:C 为信号类数量;P (m ,n )是信号对(ωm ,ωn )的先验概率,而条件概率P ((m ,n )|Lv )则是信号对(ωm ,ωn )和地物类型Lv 间的随机链接。条件概率P ((m ,n )|Lv )可以从训练样本中获得。本文假设先验概率P (Lv )服从一致分布。具体推导步骤请参见参考文献[16 ]。
通过相应的模糊隶属度可以计算概率P ((m ,n )|(${{{p}_{i}}_{,}}_{j}$ pg , h
(2) P ((m ,n )|(pi , j pg , h P (m |pi , j P (n |pg , h um (i ,j )×un (g ,h ) ,
式中P (m |pi , j P (n |pg , h pi , j pg , h ωm 和ωn 的条件概率,可基于模糊隶属度um (i ,j )和un (g ,h )估计。概率P ((pi , j pg , h pi , j pi , j pg , h P (Lv |pi , j Ni , j pg , h P (Lv |pi , j P ((pi , j pg , h pi , j Ni , j Ni , j Ni , j
1.2 基于模糊隶属度的CSBN模型训练
为了计算后验概率P (Lv |pi , j Lv 的训练集Tv 估计获得概率P ((m ,n )|Lv )。估计公式基于信号对(ωm ,ωn )出现在地物Lv 中的频率SPFv (m ,n ),其定义为:
(3) SPFv (m ,n )=${\sum }_{\begin{array}{l}{p}_{x,y}\in {T}_{v}\\ {p}_{g,h}\in {N}_{x,y}\end{array}}^{}$ um (x ,y )×un (g ,h ) 。
由于模糊隶属度um (x ,y )和un (g ,h )的取值范围是0~1,因此需要对训练集Tv 中所有像素对(${{{p}_{x}}_{,}}_{y}$ pg , h ωm ,ωn )的模糊隶属度值求和,得到信号对频率SPFv (m ,n )。
基于各个信号对(ωϑ ,ωμ )(ϑ ,μ = 1,2,…,C )的频率SPFv (ϑ ,μ ),条件概率P ((m ,n )|Lv )可以近似为:
(4) P ((m ,n )|Lv )≈
P ((m ,n )|Lv ,Tv )=$\frac{SP{F}_{v}(m,n)}{{\sum }_{1\le \vartheta ,\mu \le C}^{}SP{F}_{v}(\vartheta ,\mu )}$ 。
进一步,为计算式(4)中的P ((m ,n )|Lv ),则先验概率P ((m ,n ))的计算采用以下总概率公式:
(5) P ((m ,n ))=${\sum }_{v}^{}$ P ((m ,n )|Lv )P (Lv ) ,
其中P ((m ,n )|Lv )由式(3)和式(4)估计得到。
1.3 CVAPS法
设pi , j i 行和第j 列中的像素。当混合像元pi , j L 1 和L 2 组成时,遥感图像中像元在t 1 和t 2 时刻的光谱变化较小,导致其在两时相图像中估计的后验概率向量变化不显著。假设在t 1 时刻,后验概率P (L 1 |pi , j P (L 2 |pi , j pi , j L 1 ;假设在t 2 时刻,后验概率P (L 1 |pi , j L 2 |pi , j pi , j L 2 。因此,PCC方法将像素pi , j
为了解决这个问题,Chen等[12 ] 提出了CVAPS框架,分别用ρ 1 =(${\rho }_{1}^{1}$ ${\rho }_{v}^{1}$ ${\rho }_{s}^{1}$ ρ 2 =(${\rho }_{1}^{2}$ ${\rho }_{v}^{2}$ ${\rho }_{s}^{2}$ t 1 和t 2 时刻的后验概率向量。${\rho }_{v}^{1}$ ${\rho }_{v}^{2}$ t 1 和t 2 时刻的后验概率P (Lv |pi , j s 表示两时相图像中地物类型的数量。因此,像素pi , j ρ 定义为:
(6) Δρ =ρ 2 -ρ 1 ,
(7) ‖Δρ‖=$\sqrt[ ]{\sum _{v=1}^{s}({\rho }_{v}^{2}-{\rho }_{v}^{1}{)}^{2}}$ 。
本文根据式(7)生成后验概率变化幅度图,经过自动阈值算法处理,生成变化二值图。由于CVAPS比较两时相后验概率向量而不是分类结果,因此显著降低了累积分类误差。此外,与CVA相比,CVAPS将类内和类间距离进行归一化处理,使得不同类型的变化幅度‖Δρ‖在同一尺度内,因而适合使用单一阈值有效确定变化与非变化像素,无需采用复杂的多阈值算法。
1.4 FCM聚类算法
FCM算法是一种基于目标函数的模糊聚类算法,能将单一像元以不同隶属度分解成不同信号类,从而建立起像元与信号类间的随机链接,分解混合像元。假设存在t 时相M 行N 列像素构成的遥感影像I ,将影像I 划分为C 个信号类,uk (i ,j )(1≤k ≤C )是像素${{{p}_{i}}_{,}}_{j}$ ωk 的隶属度。FCM聚类算法的目标函数定义为:
(8) J (U ,ψ )=${\sum }_{\begin{array}{l}1\le i\le M\\ 1\le j\le N\end{array}}^{}\sum _{k=1}^{C}({u}_{k}(i,j){)}^{q}{‖{p}_{(i,j)}-{\Omega }_{k}‖}^{2}$ ,
式中:J 为目标函数;U 为由Uk 组成的模糊矩阵;ψ ={Ω 1 ,…,Ωk ,…,ΩC }是信号类中心的集合;Ωk 为信号类ωk 的中心;q 为模糊度参数。
1.5 MC法
多变化类型问题可以表现为如下形式:设Ω ={Ω n ,Ω c }为所有类的集合,其中Ω n 为不变类,Ω c ={Ω c1 ,Ω c2 ,…,Ω c k k 种可能变化类型的集合。多变化类型任务的目标即为检测变化像元Ω c ,并识别它们在{Ω c1 ,Ω c2 ,…,Ω c k
首先,使用Ed 来表示仅属于类d 的标准像素后验概率向量,表达式为:
(9) Ed =(e 1 ,…,ej ,…,em ) ,
(10) ej =$\left\{\begin{array}{l}1, j=d\\ 0, j\ne d\end{array}\right.$ 。
如果一个标准像素在一段时间内从a 类变为b 类,则其标准变化向量可表示为:
(11) ΔEab =Eb -Ea 。
设t 1 和t 2 时刻在同一像素上获取的后验概率变化向量为Δρ 。在多变化类型检测中,SVM-CVAPS根据后验概率变化向量与标准变化向量的MC来判断变化类型。MC法使用标准变化向量集SE ={ΔEab |a ,b =1,2,…,m ,a ≠b }确定Δρ 的变化类型。假设标准变化向量集SE 中的ΔEqr 与Δρ 的夹角最小,表明ΔEqr 与Δρ 的变化类型相似。因此,Δρ 的变化类型被确定为“从q 到r ”。所有标准变化向量ΔEab 具有相同的范数值,即最小夹角相当于内积的最大值,那么,就可以通过式(12)来确定变化类型:
(12) (q ,r )=argmaxa , b ρ ,ΔEab >} 。
假设在两时相遥感影像中共有N 类地物,每一个像素的后验概率变化向量需要与N ×(N -1)个标准变化向量比较,并根据MC确定变化类型。然而,较多的地物类型会生成过多的标准变化向量,这些标准变化向量互相干扰,大大降低了多元变化检测的精度。
1.6 AT法
针对上述MC法的问题,本文在MC法提出的标准变化向量基础上,根据夹角阈值确定变化类型。由于后验概率变化向量Δρ 和标准变化向量ΔEab 间夹角θ 可以有效反映不同类型的变化信息,因此本文提出的AT法使用夹角θ 来区分多种变化类型。夹角θ 的计算公式为:
(13) θ =arccos$\left(\frac{\Delta \rho ,\Delta {E}_{ab}}{‖\Delta \rho ‖‖\Delta {E}_{ab}‖}\right)$ ,θ ∈[0,180]° 。
假设ΔEqr (ΔEqr ∈SE )与Δρ 的夹角θ小于阈值角度T (T =30° ),则表示ΔEqr 与Δρ 的变化方向相似,因此确定Δρ 的变化类型为“从q 到r ”。由于AT法仅仅根据单一标准变化向量ΔEqr 确定像素的变化类型,避免了过多标准变化向量互相干扰的问题,显著提高了变化类型判断精度。
2 实验结果及分析
2.1 数据源
本文使用的影像数据来自SenseEarth平台数据集(地址为: https://rs.sensetime.com/ ),空间分辨率为3 m,影像尺寸为512像素×512像素。遥感影像经过了辐射校正、几何纠正和图像配准预处理操作。研究区1实验影像共包括1类地物变化类型,为林地到荒地;研究区2实验影像共包括2类地物变化类型,分别为建筑物到荒地、建筑物到林地;研究区3实验影像共包括3类地物变化类型,分别为荒地到建筑物、林地到建筑物、建筑物到荒地。各研究区总地物类型数量和变化类型数量如表1 所示。算法运行环境为 13th Gen Intel Core i7-13700KF 3.42 GHz,32 GB内存,16核24线程处理器。为了验证方法的有效性,本文选用FCM-SBN-CVAPS-AT,SVM-CVAPS-AT,FCM-CSBN-CVAPS-MC,FCM-SBN-CVAPS-MC,SVM-CVAPS-MC,FCM-CSBN-PCC和DCVA[20 ] 算法作为对比算法,同本文提出的FCM-CSBN-CVAPS-AT算法进行比较。
2.2 检测结果示例
本节实验中用到的FCM-CSBN-CVAPS-AT,FCM-SBN-CVAPS-AT,SVM-CVAPS-AT,FCM-CSBN-CVAPS-MC,FCM-SBN-CVAPS-MC,SVM-CVAPS-MC和FCM-CSBN-PCC算法的运行参数为:聚类数为10,模糊参数q =3.5,每类训练样本数为1 000;DCVA算法无运行参数;AT法的角度阈值T =30°。
综合考虑研究区内地物变化,本文关注的地物变化类型主要有以下5种:建筑物到荒地,建筑物到林地,林地到荒地,林地到建筑物,荒地到建筑物。图2 —4 分别为研究区1、研究区2和研究区3的遥感影像及其检测变化结果。通过对比可以发现:① FCM-CSBN-CVAPS-AT算法性能明显优于SVM-CVAPS-AT,FCM-SBN-CVAPS-AT,FCM-CSBN-PCC和DCVA算法;② FCM-CSBN-CVAPS-MC算法性能明显优于SVM-CVAPS-MC,FCM-SBN-CVAPS-MC和FCM-CSBN-PCC算法。这证明了FCM-CSBN-CVAPS算法在多元变化检测中的优越性。并且,在绝大多数情况下,各个算法的AT版本精度均优于MC版本,证明了AT法的优势。
图2
图2
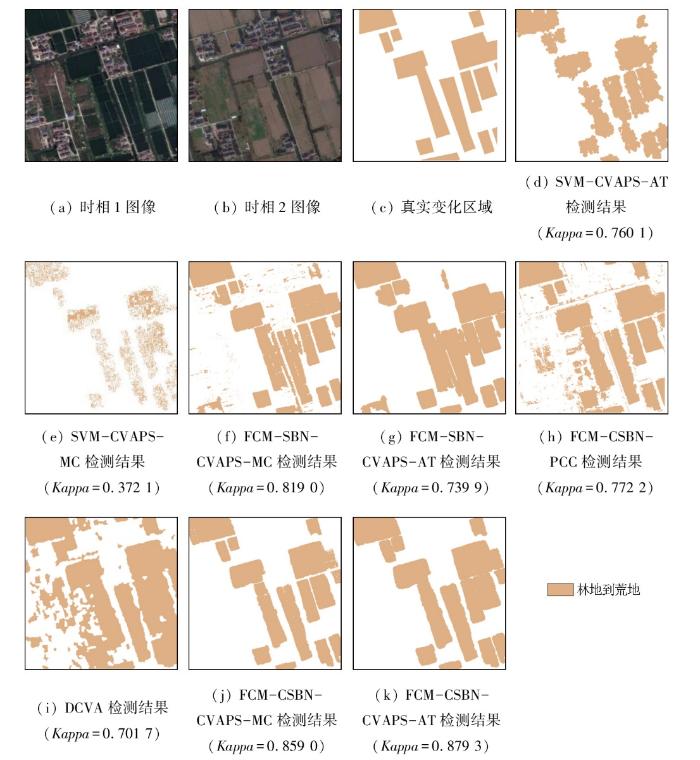
研究区1变化检测算法比较
Fig.2
Comparison of change detection algorithms of study area 1
研究区1的地物变化类型为林地到荒地。从图2(d) 和(e) 可以看出,SVM-CVAPS-AT算法无明显漏检区域,但边界较为模糊,漏检区域较大;SVM-CVAPS-MC算法漏检严重,边界更为模糊。从图2(f) 和(g) 可以看出,FCM-SBN-CVAPS-MC算法虽检测出较为清晰的边界区域,但存在一定面积错检区域;FCM-SBN-CVAPS-AT算法虽也存在错检区域,但边界区域较FCM-SBN-CVAPS-MC法更为清晰。从图2(h) 可以看出,FCM-CSBN-PCC算法相较于其他算法漏检范围小,但存在大量错检区域。从图2(i) 可以看出,DCVA算法检测结果边界较为模糊,存在大量错检区域。从图2(j) 和(k) 可以看出,与MC法相比,FCM-CSBN-CVAPS-AT算法的错检、漏检范围小,较好地保留了变化区域的边界信息,取得了最好的变化检测结果。
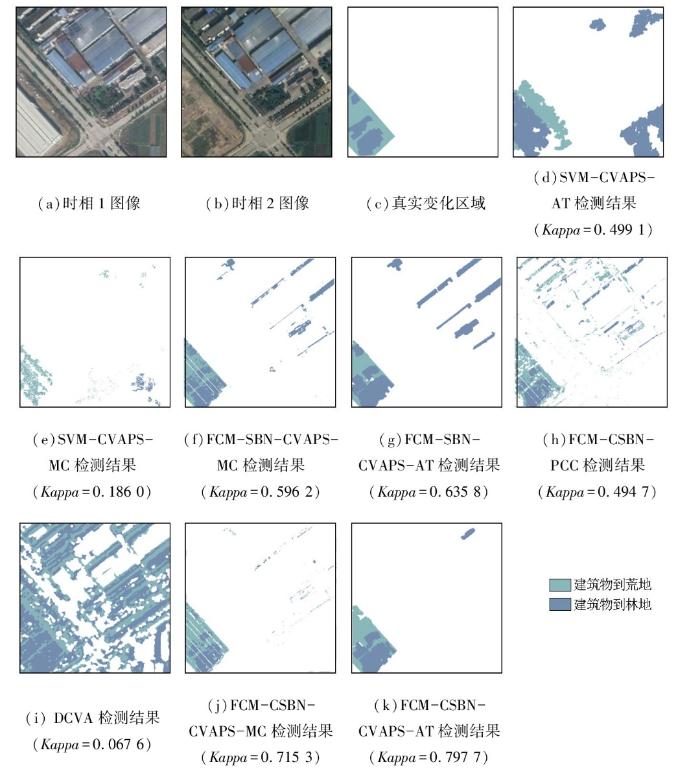
研究区2的地物变化类型为:建筑物到林地、建筑物到荒地。从图3(d)—(i) 可以看出,与研究区1的结果类似,各个对比算法均未取得满意的检测结果。从图3(j) 和(k) 可以看出,FCM-CSBN-CVAPS-MC算法虽可以检测出边界信息,但仍存在少量漏检区域;而FCM-CSBN-CVAPS-AT算法能较好地检测和保留变化区域边界细节,有效检测到2种变化类型,具有最高的精度。
图3
图3
研究区2变化检测算法比较
Fig.3
Comparison of change detection algorithms of study area 2
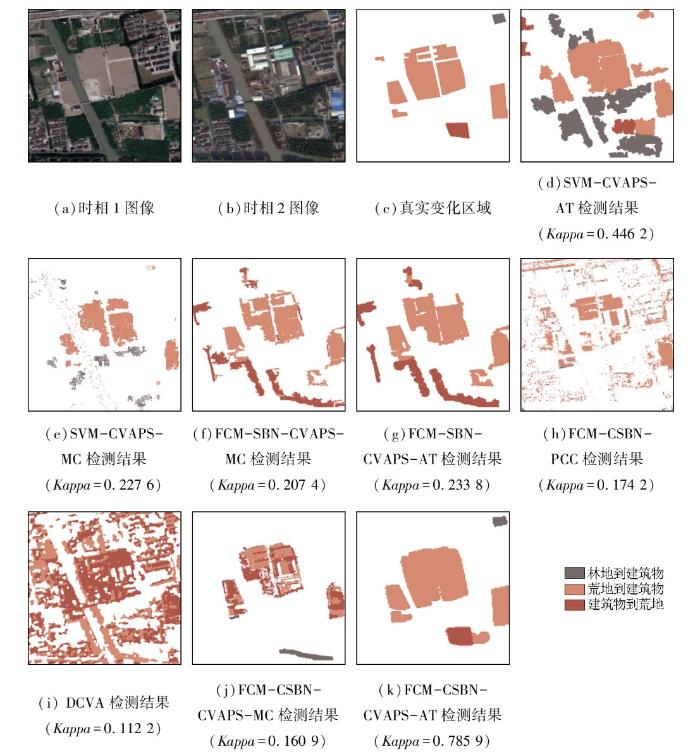
研究区3的地物变化类型为:荒地到建筑物、林地到荒地和建筑物到荒地。从图4(d)—(i) 可以看出,与研究区1和2类似,各个对比算法无法取得满意的检测结果。从图4(j) 可以看出,FCM-CSBN-CVAPS-MC算法存在明显的错检和漏检区域,识别建筑物的变化类型时,将大块区域的荒地到建筑物检测为建筑物到荒地,将未变化的水体检测为林地到建筑物,未能正确识别出变化类型。从图4(k) 可以看出,FCM-CSBN-CVAPS-AT算法只存在少量漏检和错检区域,可以较完整地识别出变化区域和变化类型,检测效果最好。
图4
图4
研究区3变化检测算法比较
Fig.4
Comparison of change detection algorithms of study area 3
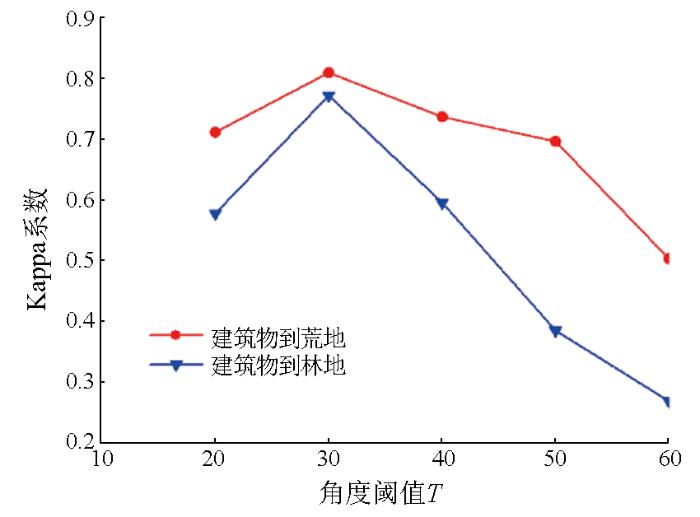
本实验以FCM-CSBN-CVAPS-AT算法检测研究区2的变化类型为例,测试角度阈值对本文算法的影响。角度T 取6个值,即10°,20°,30°,40°,50°和60°,如图5 所示,在T 为30°时取得最高Kappa系数,当T 大于或小于30°时,Kappa值均小于0.771 2。此外,T 为10°时未检测出变化区域。由此可见,过高或过低的角度阈值都会导致Kappa值降低。
图5
图5
角度阈值对研究区2变化地物Kappa系数的影响
Fig.5
The influence of angle threshold on Kappa coefficient of changing features in study area 2
2.3 算法综合性能比较
本文使用错检率、漏检率、总体精度和Kappa系数4个指标对本文方法和对比方法的多变化检测性能进行比较分析。
从表2 —3 的实验结果可以看出,本文算法虽未完全取得最低错检率和漏检率,但总体精度和Kappa系数均高于其他对比算法。以研究区2的建筑物到林地变化类型为例(表2 ),本文算法比FCM-SBN-CVAPS-AT算法的总体精度和Kappa系数分别高出3.46%和0.230 7,比SVM-CVAPS-AT算法的总体精度和Kappa系数分别高出2.08%和0.281 7。
由于DCVA算法预训练网络精度不适用于本文实验影像,所以本文算法的总体精度和Kappa系数分别比DCVA算法高出28.36%和0.656 4。
如表2 所示,本文算法的Kappa系数比FCM-CSBN-PCC算法高出0.244 2,证明CVAPS比PCC更不易受累积分类误差的影响。此外,FCM-CSBN-CVAPS-AT和FCM-SBN-CVAPS-AT算法分别比FCM-CSBN-CVAPS-MC和FCM-SBN-CVAPS-AT算法Kappa系数高出0.062 9和0.037 9,由此证明AT法比MC法具有更高的检测精度,在多元变化类型检测中更具优势。
SVM-CVAPS算法估计的后验概率向量具有较低不确定性,因而大大高估了变化区域。从研究区2和3的实验结果中可以看出,SVM-CVAPS算法具有较高的漏检率和错检率,并且其在多类地物变化检测中无法同时正确识别多种地物类型变化情况。相比之下,FCM-CSBN-CVAPS使用CSBN合理引入了空间信息,其估计后验概率向量虽然也具有较低的不确定性,但没有明显高估变化区域,检测的变化区域最为准确且边界较为平滑。
3 结论
由于地物光谱的低可分性和地物结构的高度复杂性,遥感图像的不确定性常常限制了基于遥感的多变化检测性能。本文所使用的FCM-CSBN-CVAPS-AT算法通过CSBN引入空间信息估计后验概率变化向量并根据后验概率变化向量的方向来判断变化类型,实现针对HRRS影像多变化类型检测。实验证明,与对比算法相比,本算法精度更高且不易受参数影响,具有更高鲁棒性。
尽管本文所提出的算法取得了较好的多变化检测性能,但仍存在以下缺点:首先,确定模糊度q 、聚类数和CSBN的窗口大小需要通过实验来完成;其次,CSBN的计算复杂度较高,计算时间明显长于对比算法。因此,未来工作将着重于开发一种自动确定最佳模糊度q 、信号类数量和窗口大小的方法,并通过并行计算降低计算时间,以提高算法的实用性。
参考文献
View Option
[1]
李德仁 . 利用遥感影像进行变化检测
[J]. 武汉大学学报(信息科学版) , 2003 , 28 (s1 ):7 -12 .
[本文引用: 1]
Li D R Change detection from remote sensing images
[J]. Geoma-tics and Information Science of Wuhan University , 2003 , 28 (s1 ):7 -12 .
[本文引用: 1]
[2]
李天宏 , 韩鹏 . 厦门市土地利用/覆盖动态变化的遥感检测与分析
[J]. 地理科学 , 2001 , 21 (6 ):537 -543 .
Li T H Han P Land use/cover change detection and analysis with remote sensing in Xiamen City
[J]. Scientia Geographica Sinica , 2001 , 21 (6 ):537 -543 .
DOI:10.13249/j.cnki.sgs.2001.06.537
Remote sensing is an important approach for land use /cover change detection. With two phrases of remotely sensed images covering Xiamen City in 1990 and 1997 respectively, this paper applied Maximum Likelihood Classification and visual interpretation to obtain the land use/cover classification of seven categories, namely build-up, development use, transportation, arable land, garden and forest, water body and unused land. And the land use/cover change image was obtained via map algebraic calculation. The results show that resident area increased in a large amount from 1990 to 1997, while arable land decreased nearly at the same extent. The decreased arable land was mainly occupied by build-up, development use and transportation. In 1990, land used for development was mainly located in the Xiamen Island and amounted to 65 percent of the whole development land of the city, while in 1997, the percentage decreased to 30 percent which demonstrated that developing emphasis has shifted from down town to suburb in the 7-year period.
[3]
严宇 , 刘耀林 . 基于融合和IFLICM算法的非监督遥感影像变化检测
[J]. 测绘通报 , 2018 (3 ):25 -31 .
DOI:10.13474/j.cnki.11-2246.2018.0070
提出了一种基于多尺度小波融合和改进的非监督模糊聚类的多光谱遥感影像变化检测方法。该算法解决了目前很多算法造成虚警率较高,而且未能充分利用像元之间空间关系的问题。首先利用二维离散小波(DWT)多尺度分解的方式来构造差异图,通过对两种小波分解系数融合的方式来抑制噪声点和突出变化区域。考虑到像元之间的空间位置信息,在融合后的基础上采用改进的模糊局部信息聚类(IFLICM)的方法得到变化检测结果。对两个时相的多光谱遥感卫星影像进行变化检测试验,试验表明基于融合的变化检测结果精度更高,并且改进后的聚类算法效果比其他聚类算法效果更好。
Yan Y Liu Y L Unsupervised remote sensing image change detection based on fusion and IFLICM algorithm
[J]. Bulletin of Surveying and Mapping , 2018 (3 ):25 -31 .
DOI:10.13474/j.cnki.11-2246.2018.0070
A new method based on multiscale wavelet fusion and improved unsupervised fuzzy clustering algorithm for multispectral remote sensing image change detection is proposed.This algorithm solves the problems that many state of arts algorithms causing too much noise,and failing to fully exploit the spatial relationship between pixels.Firstly,the difference image is constructed by the method of two-dimensional discrete wavelet transform (DWT) multi-scale decomposition,so the speckle noise is constrained and the changed regions are highlighted by fusing two wavelet decomposition coefficients.Next,Considering the spatial neighborhood information of pixels,the improved fuzzy local information clustering (IFLICM) method is implemented to get the result of the change detection on the basis of fusion image.Experiments on multi-temporal images show that the image fusion strategy integrates the advantages of CVA and ADI images and gains a better performance.The change detection results obtained by the improved fuzzy clustering algorithm exhibited lower error than other clustering algorithms.
[4]
Song J X Li Y K Yang S W et al. NSCT-based change detection for high-resolution remote sensing images under the framework of change vector analysis in posterior probability space
[J]. Remote Sensing for Natural Resources , 2024 , 36 (3 ):128 -136 .doi:10.6046/zrzyyg.2023079 .
[5]
谢江陵 , 李轶鲲 , 李小军 , 等 . 基于耦合空间模糊C均值聚类和推土机距离的变化检测
[J]. 遥感信息 , 2024 , 39 (3 ):144 -152 .
Xie J L Li Y K Li X J et al. Change detection using coupling spatial fuzzy C-means clustering and earth mover’s distance
[J]. Remote Sensing Information , 2024 , 39 (3 ):144 -152 .
[6]
Song J X Li Y K Li X J et al. Unsupervised remote sensing image classification with differentiable feature clustering by coupled transformer
[J]. Journal of Applied Remote Sensing , 2024 , 18 (2 ):026505 .
[7]
[本文引用: 1]
Zhao H T Li X J Xu X Y et al. An ICM-based adaptive pansharpening algorithm for hyperspectral images
[J]. Remote Sensing for Natural Resources , 2024 , 36 (2 ):97 -104 .doi:10.6046/zrzyyg.2023026 .
[本文引用: 1]
[8]
Gao X Xiong H K Unsupervised representation learning with prior-free and adversarial mechanism embedded autoencoders [C]// 2018 IEEE International Conference on Multimedia and Expo (ICME). IEEE ,2018:1 -6 .
[本文引用: 1]
[9]
Liang C F Chen Z A self-supervised hierarchical clustering network for multiple change detection in multitemporal hyperspectral images [C]// 2022 12th Workshop on Hyperspectral Imaging and Signal Processing:Evolution in Remote Sensing (WHISPERS). IEEE ,2022:1 -4 .
[本文引用: 1]
[10]
盛光伟 . 基于角度优先变化向量分析的林地变化检测 [D]. 南京 : 南京大学 , 2020 .
[本文引用: 1]
Sheng G W Forest change detection based on direction-first change vector analysis [D]. Nanjing : Nanjing University , 2020 .
[本文引用: 1]
[11]
Li L Li X Zhang Y et al. Change detection for high-resolution remote sensing imagery using object-oriented change vector analysis method [C]// 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS). IEEE ,2016:2873 -2876 .
[本文引用: 1]
[12]
Chen J Chen X H Cui X H et al. Change vector analysis in posterior probability space:A new method for land cover change detection
[J]. IEEE Geoscience and Remote Sensing Letters , 2011 , 8 (2 ):317 -321 .
[本文引用: 2]
[13]
Melgani F Bruzzone L Classification of hyperspectral remote sens-ing images with support vector machines
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2004 , 42 (8 ):1778 -1790 .
[本文引用: 1]
[14]
Lantzanakis G Mitraka Z Chrysoulakis N X-SVM:An extension of C-SVM algorithm for classification of high-resolution satellite imagery
[J]. IEEE Transactions on Geoscience and Remote Sens-ing , 2021 , 59 (5 ):3805 -3815 .
[本文引用: 1]
[15]
龙亦凡 , 乔雯钰 , 孙静 . 基于SVM的大屯矿区遥感影像变化检测
[J]. 测绘与空间地理信息 , 2020 , 43 (12 ):107 -110 ,115.
[本文引用: 2]
Long Y F Qiao W Y Sun J Change detection of remote sensing images in Datun mining area based on support vector machine
[J]. Geomatics & Spatial Information Technology , 2020 , 43 (12 ):107 -110 ,115.
[本文引用: 2]
[16]
Li Y K Li X J Song J X et al. Remote-sensing-based change detection using change vector analysis in posterior probability space:A context-sensitive Bayesian network approach
[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing , 2023 , 16 :3198 -3217 .
[本文引用: 2]
[17]
Li Y K Yang Y Yang S W et al. A change vector analysis in posterior probability space combined with fuzzy C-means clustering and a Bayesian network
[J]. Remote Sensing for Natural Resources , 2021 , 33 (4 ):82 -88 .doi:10.6046/zrzyyg.2021032 .
[18]
Li Y K Yang S W Liu T et al. Comparative assessment of semantic-sensitive satellite image retrieval:Simple and context-sensitive Bayesian networks
[J]. International Journal of Geographical Information Science , 2012 , 26 (2 ):247 -263 .
[本文引用: 1]
[19]
Otsu N A threshold selection method from gray-level histograms
[J]. IEEE Transactions on Systems,Man,and Cybernetics , 1979 , 9 (1 ):62 -66 .
[本文引用: 1]
[20]
Saha S Bovolo F Bruzzone L Unsupervised deep change vector analysis for multiple-change detection in VHR images
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2019 , 57 (6 ):3677 -3693 .
[本文引用: 1]
利用遥感影像进行变化检测
1
2003
... 在过去几十年里,遥感变化检测方法被广泛应用于各种遥感领域(如林业、农业、城市和灾害监测)[1 7 ] .根据遥感变化检测的目的,可以将其分为2类:二元变化检测(目的是区分变化类和无变化类)和多元变化检测(目的是区分不同类型的变化)[8 ] .与二元变化检测相比,多元变化检测在处理多地物影像时,变化类型数量的增加会提高计算复杂性和变化类型估计难度[9 ] . ...
利用遥感影像进行变化检测
1
2003
... 在过去几十年里,遥感变化检测方法被广泛应用于各种遥感领域(如林业、农业、城市和灾害监测)[1 7 ] .根据遥感变化检测的目的,可以将其分为2类:二元变化检测(目的是区分变化类和无变化类)和多元变化检测(目的是区分不同类型的变化)[8 ] .与二元变化检测相比,多元变化检测在处理多地物影像时,变化类型数量的增加会提高计算复杂性和变化类型估计难度[9 ] . ...
厦门市土地利用/覆盖动态变化的遥感检测与分析
0
2001
厦门市土地利用/覆盖动态变化的遥感检测与分析
0
2001
基于融合和IFLICM算法的非监督遥感影像变化检测
0
2018
基于融合和IFLICM算法的非监督遥感影像变化检测
0
2018
基于后验概率空间变化向量分析的NSCT高分辨率遥感影像变化检测
0
2024
基于后验概率空间变化向量分析的NSCT高分辨率遥感影像变化检测
0
2024
基于耦合空间模糊C均值聚类和推土机距离的变化检测
0
2024
基于耦合空间模糊C均值聚类和推土机距离的变化检测
0
2024
Unsupervised remote sensing image classification with differentiable feature clustering by coupled transformer
0
2024
基于ICM的高光谱图像自适应全色锐化算法
1
2024
... 在过去几十年里,遥感变化检测方法被广泛应用于各种遥感领域(如林业、农业、城市和灾害监测)[1 7 ] .根据遥感变化检测的目的,可以将其分为2类:二元变化检测(目的是区分变化类和无变化类)和多元变化检测(目的是区分不同类型的变化)[8 ] .与二元变化检测相比,多元变化检测在处理多地物影像时,变化类型数量的增加会提高计算复杂性和变化类型估计难度[9 ] . ...
基于ICM的高光谱图像自适应全色锐化算法
1
2024
... 在过去几十年里,遥感变化检测方法被广泛应用于各种遥感领域(如林业、农业、城市和灾害监测)[1 7 ] .根据遥感变化检测的目的,可以将其分为2类:二元变化检测(目的是区分变化类和无变化类)和多元变化检测(目的是区分不同类型的变化)[8 ] .与二元变化检测相比,多元变化检测在处理多地物影像时,变化类型数量的增加会提高计算复杂性和变化类型估计难度[9 ] . ...
1
2018
... 在过去几十年里,遥感变化检测方法被广泛应用于各种遥感领域(如林业、农业、城市和灾害监测)[1 7 ] .根据遥感变化检测的目的,可以将其分为2类:二元变化检测(目的是区分变化类和无变化类)和多元变化检测(目的是区分不同类型的变化)[8 ] .与二元变化检测相比,多元变化检测在处理多地物影像时,变化类型数量的增加会提高计算复杂性和变化类型估计难度[9 ] . ...
1
2022
... 在过去几十年里,遥感变化检测方法被广泛应用于各种遥感领域(如林业、农业、城市和灾害监测)[1 7 ] .根据遥感变化检测的目的,可以将其分为2类:二元变化检测(目的是区分变化类和无变化类)和多元变化检测(目的是区分不同类型的变化)[8 ] .与二元变化检测相比,多元变化检测在处理多地物影像时,变化类型数量的增加会提高计算复杂性和变化类型估计难度[9 ] . ...
1
2020
... 在当前的遥感变化检测方法中,分类后变化检测(post-classification comparison,PCC)方法通过对不同时相的遥感图像进行分类来识别变化信息,但易受到累积分类误差的影响.而变化向量分析法(change vector analysis,CVA)[10 -11 ] 由于对图像的辐射校正要求严格,且易受到多种干扰因素的影响,应用受到了限制.为克服这些限制,Chen等[12 ] 提出了后验概率空间变化向量分析法(change vector analysis in posterior probability space,CVAPS),它放宽了对图像辐射校正的要求,并具有更高的变化检测性能.并且,CVAPS可以根据后验概率变化向量的方向,区分不同类型的变化,实现多元变化检测.然而,CVAPS利用支持向量机(support vector machine,SVM)[13 -14 ] 来估计遥感图像像素的后验概率向量,易受到遥感图像中同物异谱、异物同谱、混合像元等因素的影响,从而难以准确估计复杂像元后验概率向量的强度和方向,并影响了其后多元变化检测的精度[15 ] .为解决这一问题,李轶鲲等[16 18 ] 结合模糊C均值聚类(fuzzy C-means,FCM)和上下文敏感的贝叶斯网络(context-sensitive Bayesian network,CSBN),提出了FCM-CSBN-CVAPS方法.该方法通过建立像素与多种地物之间的随机链接,能够有效处理同物异谱、异物同谱及混合像元等问题,从而提高了变化检测的准确性和鲁棒性.因此本文基于CSBN估计后验概率变化向量,实现了更为精确的多元变化检测.在多元变化检测方法中,SVM-CVAPS根据后验概率变化向量与标准变化向量的最大相关程度(maximum correlation,MC)来判断变化类型[15 ] .然而,较多的地物类型会生成过多的标准变化向量,这些标准变化向量互相干扰,大大降低了多元变化检测的精度. ...
1
2020
... 在当前的遥感变化检测方法中,分类后变化检测(post-classification comparison,PCC)方法通过对不同时相的遥感图像进行分类来识别变化信息,但易受到累积分类误差的影响.而变化向量分析法(change vector analysis,CVA)[10 -11 ] 由于对图像的辐射校正要求严格,且易受到多种干扰因素的影响,应用受到了限制.为克服这些限制,Chen等[12 ] 提出了后验概率空间变化向量分析法(change vector analysis in posterior probability space,CVAPS),它放宽了对图像辐射校正的要求,并具有更高的变化检测性能.并且,CVAPS可以根据后验概率变化向量的方向,区分不同类型的变化,实现多元变化检测.然而,CVAPS利用支持向量机(support vector machine,SVM)[13 -14 ] 来估计遥感图像像素的后验概率向量,易受到遥感图像中同物异谱、异物同谱、混合像元等因素的影响,从而难以准确估计复杂像元后验概率向量的强度和方向,并影响了其后多元变化检测的精度[15 ] .为解决这一问题,李轶鲲等[16 18 ] 结合模糊C均值聚类(fuzzy C-means,FCM)和上下文敏感的贝叶斯网络(context-sensitive Bayesian network,CSBN),提出了FCM-CSBN-CVAPS方法.该方法通过建立像素与多种地物之间的随机链接,能够有效处理同物异谱、异物同谱及混合像元等问题,从而提高了变化检测的准确性和鲁棒性.因此本文基于CSBN估计后验概率变化向量,实现了更为精确的多元变化检测.在多元变化检测方法中,SVM-CVAPS根据后验概率变化向量与标准变化向量的最大相关程度(maximum correlation,MC)来判断变化类型[15 ] .然而,较多的地物类型会生成过多的标准变化向量,这些标准变化向量互相干扰,大大降低了多元变化检测的精度. ...
1
2016
... 在当前的遥感变化检测方法中,分类后变化检测(post-classification comparison,PCC)方法通过对不同时相的遥感图像进行分类来识别变化信息,但易受到累积分类误差的影响.而变化向量分析法(change vector analysis,CVA)[10 -11 ] 由于对图像的辐射校正要求严格,且易受到多种干扰因素的影响,应用受到了限制.为克服这些限制,Chen等[12 ] 提出了后验概率空间变化向量分析法(change vector analysis in posterior probability space,CVAPS),它放宽了对图像辐射校正的要求,并具有更高的变化检测性能.并且,CVAPS可以根据后验概率变化向量的方向,区分不同类型的变化,实现多元变化检测.然而,CVAPS利用支持向量机(support vector machine,SVM)[13 -14 ] 来估计遥感图像像素的后验概率向量,易受到遥感图像中同物异谱、异物同谱、混合像元等因素的影响,从而难以准确估计复杂像元后验概率向量的强度和方向,并影响了其后多元变化检测的精度[15 ] .为解决这一问题,李轶鲲等[16 18 ] 结合模糊C均值聚类(fuzzy C-means,FCM)和上下文敏感的贝叶斯网络(context-sensitive Bayesian network,CSBN),提出了FCM-CSBN-CVAPS方法.该方法通过建立像素与多种地物之间的随机链接,能够有效处理同物异谱、异物同谱及混合像元等问题,从而提高了变化检测的准确性和鲁棒性.因此本文基于CSBN估计后验概率变化向量,实现了更为精确的多元变化检测.在多元变化检测方法中,SVM-CVAPS根据后验概率变化向量与标准变化向量的最大相关程度(maximum correlation,MC)来判断变化类型[15 ] .然而,较多的地物类型会生成过多的标准变化向量,这些标准变化向量互相干扰,大大降低了多元变化检测的精度. ...
Change vector analysis in posterior probability space:A new method for land cover change detection
2
2011
... 在当前的遥感变化检测方法中,分类后变化检测(post-classification comparison,PCC)方法通过对不同时相的遥感图像进行分类来识别变化信息,但易受到累积分类误差的影响.而变化向量分析法(change vector analysis,CVA)[10 -11 ] 由于对图像的辐射校正要求严格,且易受到多种干扰因素的影响,应用受到了限制.为克服这些限制,Chen等[12 ] 提出了后验概率空间变化向量分析法(change vector analysis in posterior probability space,CVAPS),它放宽了对图像辐射校正的要求,并具有更高的变化检测性能.并且,CVAPS可以根据后验概率变化向量的方向,区分不同类型的变化,实现多元变化检测.然而,CVAPS利用支持向量机(support vector machine,SVM)[13 -14 ] 来估计遥感图像像素的后验概率向量,易受到遥感图像中同物异谱、异物同谱、混合像元等因素的影响,从而难以准确估计复杂像元后验概率向量的强度和方向,并影响了其后多元变化检测的精度[15 ] .为解决这一问题,李轶鲲等[16 18 ] 结合模糊C均值聚类(fuzzy C-means,FCM)和上下文敏感的贝叶斯网络(context-sensitive Bayesian network,CSBN),提出了FCM-CSBN-CVAPS方法.该方法通过建立像素与多种地物之间的随机链接,能够有效处理同物异谱、异物同谱及混合像元等问题,从而提高了变化检测的准确性和鲁棒性.因此本文基于CSBN估计后验概率变化向量,实现了更为精确的多元变化检测.在多元变化检测方法中,SVM-CVAPS根据后验概率变化向量与标准变化向量的最大相关程度(maximum correlation,MC)来判断变化类型[15 ] .然而,较多的地物类型会生成过多的标准变化向量,这些标准变化向量互相干扰,大大降低了多元变化检测的精度. ...
... 为了解决这个问题,Chen等[12 ] 提出了CVAPS框架,分别用ρ 1 =(${\rho }_{1}^{1}$ ${\rho }_{v}^{1}$ ${\rho }_{s}^{1}$ ρ 2 =(${\rho }_{1}^{2}$ ${\rho }_{v}^{2}$ ${\rho }_{s}^{2}$ t 1 和t 2 时刻的后验概率向量.${\rho }_{v}^{1}$ ${\rho }_{v}^{2}$ t 1 和t 2 时刻的后验概率P (Lv |pi , j s 表示两时相图像中地物类型的数量.因此,像素pi , j ρ 定义为: ...
Classification of hyperspectral remote sens-ing images with support vector machines
1
2004
... 在当前的遥感变化检测方法中,分类后变化检测(post-classification comparison,PCC)方法通过对不同时相的遥感图像进行分类来识别变化信息,但易受到累积分类误差的影响.而变化向量分析法(change vector analysis,CVA)[10 -11 ] 由于对图像的辐射校正要求严格,且易受到多种干扰因素的影响,应用受到了限制.为克服这些限制,Chen等[12 ] 提出了后验概率空间变化向量分析法(change vector analysis in posterior probability space,CVAPS),它放宽了对图像辐射校正的要求,并具有更高的变化检测性能.并且,CVAPS可以根据后验概率变化向量的方向,区分不同类型的变化,实现多元变化检测.然而,CVAPS利用支持向量机(support vector machine,SVM)[13 -14 ] 来估计遥感图像像素的后验概率向量,易受到遥感图像中同物异谱、异物同谱、混合像元等因素的影响,从而难以准确估计复杂像元后验概率向量的强度和方向,并影响了其后多元变化检测的精度[15 ] .为解决这一问题,李轶鲲等[16 18 ] 结合模糊C均值聚类(fuzzy C-means,FCM)和上下文敏感的贝叶斯网络(context-sensitive Bayesian network,CSBN),提出了FCM-CSBN-CVAPS方法.该方法通过建立像素与多种地物之间的随机链接,能够有效处理同物异谱、异物同谱及混合像元等问题,从而提高了变化检测的准确性和鲁棒性.因此本文基于CSBN估计后验概率变化向量,实现了更为精确的多元变化检测.在多元变化检测方法中,SVM-CVAPS根据后验概率变化向量与标准变化向量的最大相关程度(maximum correlation,MC)来判断变化类型[15 ] .然而,较多的地物类型会生成过多的标准变化向量,这些标准变化向量互相干扰,大大降低了多元变化检测的精度. ...
X-SVM:An extension of C-SVM algorithm for classification of high-resolution satellite imagery
1
2021
... 在当前的遥感变化检测方法中,分类后变化检测(post-classification comparison,PCC)方法通过对不同时相的遥感图像进行分类来识别变化信息,但易受到累积分类误差的影响.而变化向量分析法(change vector analysis,CVA)[10 -11 ] 由于对图像的辐射校正要求严格,且易受到多种干扰因素的影响,应用受到了限制.为克服这些限制,Chen等[12 ] 提出了后验概率空间变化向量分析法(change vector analysis in posterior probability space,CVAPS),它放宽了对图像辐射校正的要求,并具有更高的变化检测性能.并且,CVAPS可以根据后验概率变化向量的方向,区分不同类型的变化,实现多元变化检测.然而,CVAPS利用支持向量机(support vector machine,SVM)[13 -14 ] 来估计遥感图像像素的后验概率向量,易受到遥感图像中同物异谱、异物同谱、混合像元等因素的影响,从而难以准确估计复杂像元后验概率向量的强度和方向,并影响了其后多元变化检测的精度[15 ] .为解决这一问题,李轶鲲等[16 18 ] 结合模糊C均值聚类(fuzzy C-means,FCM)和上下文敏感的贝叶斯网络(context-sensitive Bayesian network,CSBN),提出了FCM-CSBN-CVAPS方法.该方法通过建立像素与多种地物之间的随机链接,能够有效处理同物异谱、异物同谱及混合像元等问题,从而提高了变化检测的准确性和鲁棒性.因此本文基于CSBN估计后验概率变化向量,实现了更为精确的多元变化检测.在多元变化检测方法中,SVM-CVAPS根据后验概率变化向量与标准变化向量的最大相关程度(maximum correlation,MC)来判断变化类型[15 ] .然而,较多的地物类型会生成过多的标准变化向量,这些标准变化向量互相干扰,大大降低了多元变化检测的精度. ...
基于SVM的大屯矿区遥感影像变化检测
2
2020
... 在当前的遥感变化检测方法中,分类后变化检测(post-classification comparison,PCC)方法通过对不同时相的遥感图像进行分类来识别变化信息,但易受到累积分类误差的影响.而变化向量分析法(change vector analysis,CVA)[10 -11 ] 由于对图像的辐射校正要求严格,且易受到多种干扰因素的影响,应用受到了限制.为克服这些限制,Chen等[12 ] 提出了后验概率空间变化向量分析法(change vector analysis in posterior probability space,CVAPS),它放宽了对图像辐射校正的要求,并具有更高的变化检测性能.并且,CVAPS可以根据后验概率变化向量的方向,区分不同类型的变化,实现多元变化检测.然而,CVAPS利用支持向量机(support vector machine,SVM)[13 -14 ] 来估计遥感图像像素的后验概率向量,易受到遥感图像中同物异谱、异物同谱、混合像元等因素的影响,从而难以准确估计复杂像元后验概率向量的强度和方向,并影响了其后多元变化检测的精度[15 ] .为解决这一问题,李轶鲲等[16 18 ] 结合模糊C均值聚类(fuzzy C-means,FCM)和上下文敏感的贝叶斯网络(context-sensitive Bayesian network,CSBN),提出了FCM-CSBN-CVAPS方法.该方法通过建立像素与多种地物之间的随机链接,能够有效处理同物异谱、异物同谱及混合像元等问题,从而提高了变化检测的准确性和鲁棒性.因此本文基于CSBN估计后验概率变化向量,实现了更为精确的多元变化检测.在多元变化检测方法中,SVM-CVAPS根据后验概率变化向量与标准变化向量的最大相关程度(maximum correlation,MC)来判断变化类型[15 ] .然而,较多的地物类型会生成过多的标准变化向量,这些标准变化向量互相干扰,大大降低了多元变化检测的精度. ...
... [15 ].然而,较多的地物类型会生成过多的标准变化向量,这些标准变化向量互相干扰,大大降低了多元变化检测的精度. ...
基于SVM的大屯矿区遥感影像变化检测
2
2020
... 在当前的遥感变化检测方法中,分类后变化检测(post-classification comparison,PCC)方法通过对不同时相的遥感图像进行分类来识别变化信息,但易受到累积分类误差的影响.而变化向量分析法(change vector analysis,CVA)[10 -11 ] 由于对图像的辐射校正要求严格,且易受到多种干扰因素的影响,应用受到了限制.为克服这些限制,Chen等[12 ] 提出了后验概率空间变化向量分析法(change vector analysis in posterior probability space,CVAPS),它放宽了对图像辐射校正的要求,并具有更高的变化检测性能.并且,CVAPS可以根据后验概率变化向量的方向,区分不同类型的变化,实现多元变化检测.然而,CVAPS利用支持向量机(support vector machine,SVM)[13 -14 ] 来估计遥感图像像素的后验概率向量,易受到遥感图像中同物异谱、异物同谱、混合像元等因素的影响,从而难以准确估计复杂像元后验概率向量的强度和方向,并影响了其后多元变化检测的精度[15 ] .为解决这一问题,李轶鲲等[16 18 ] 结合模糊C均值聚类(fuzzy C-means,FCM)和上下文敏感的贝叶斯网络(context-sensitive Bayesian network,CSBN),提出了FCM-CSBN-CVAPS方法.该方法通过建立像素与多种地物之间的随机链接,能够有效处理同物异谱、异物同谱及混合像元等问题,从而提高了变化检测的准确性和鲁棒性.因此本文基于CSBN估计后验概率变化向量,实现了更为精确的多元变化检测.在多元变化检测方法中,SVM-CVAPS根据后验概率变化向量与标准变化向量的最大相关程度(maximum correlation,MC)来判断变化类型[15 ] .然而,较多的地物类型会生成过多的标准变化向量,这些标准变化向量互相干扰,大大降低了多元变化检测的精度. ...
... [15 ].然而,较多的地物类型会生成过多的标准变化向量,这些标准变化向量互相干扰,大大降低了多元变化检测的精度. ...
Remote-sensing-based change detection using change vector analysis in posterior probability space:A context-sensitive Bayesian network approach
2
2023
... 在当前的遥感变化检测方法中,分类后变化检测(post-classification comparison,PCC)方法通过对不同时相的遥感图像进行分类来识别变化信息,但易受到累积分类误差的影响.而变化向量分析法(change vector analysis,CVA)[10 -11 ] 由于对图像的辐射校正要求严格,且易受到多种干扰因素的影响,应用受到了限制.为克服这些限制,Chen等[12 ] 提出了后验概率空间变化向量分析法(change vector analysis in posterior probability space,CVAPS),它放宽了对图像辐射校正的要求,并具有更高的变化检测性能.并且,CVAPS可以根据后验概率变化向量的方向,区分不同类型的变化,实现多元变化检测.然而,CVAPS利用支持向量机(support vector machine,SVM)[13 -14 ] 来估计遥感图像像素的后验概率向量,易受到遥感图像中同物异谱、异物同谱、混合像元等因素的影响,从而难以准确估计复杂像元后验概率向量的强度和方向,并影响了其后多元变化检测的精度[15 ] .为解决这一问题,李轶鲲等[16 18 ] 结合模糊C均值聚类(fuzzy C-means,FCM)和上下文敏感的贝叶斯网络(context-sensitive Bayesian network,CSBN),提出了FCM-CSBN-CVAPS方法.该方法通过建立像素与多种地物之间的随机链接,能够有效处理同物异谱、异物同谱及混合像元等问题,从而提高了变化检测的准确性和鲁棒性.因此本文基于CSBN估计后验概率变化向量,实现了更为精确的多元变化检测.在多元变化检测方法中,SVM-CVAPS根据后验概率变化向量与标准变化向量的最大相关程度(maximum correlation,MC)来判断变化类型[15 ] .然而,较多的地物类型会生成过多的标准变化向量,这些标准变化向量互相干扰,大大降低了多元变化检测的精度. ...
... 式中:C 为信号类数量;P (m ,n )是信号对(ωm ,ωn )的先验概率,而条件概率P ((m ,n )|Lv )则是信号对(ωm ,ωn )和地物类型Lv 间的随机链接.条件概率P ((m ,n )|Lv )可以从训练样本中获得.本文假设先验概率P (Lv )服从一致分布.具体推导步骤请参见参考文献[16 ]. ...
耦合模糊C均值聚类和贝叶斯网络的遥感影像后验概率空间变化向量分析
0
2021
耦合模糊C均值聚类和贝叶斯网络的遥感影像后验概率空间变化向量分析
0
2021
Comparative assessment of semantic-sensitive satellite image retrieval:Simple and context-sensitive Bayesian networks
1
2012
... 在当前的遥感变化检测方法中,分类后变化检测(post-classification comparison,PCC)方法通过对不同时相的遥感图像进行分类来识别变化信息,但易受到累积分类误差的影响.而变化向量分析法(change vector analysis,CVA)[10 -11 ] 由于对图像的辐射校正要求严格,且易受到多种干扰因素的影响,应用受到了限制.为克服这些限制,Chen等[12 ] 提出了后验概率空间变化向量分析法(change vector analysis in posterior probability space,CVAPS),它放宽了对图像辐射校正的要求,并具有更高的变化检测性能.并且,CVAPS可以根据后验概率变化向量的方向,区分不同类型的变化,实现多元变化检测.然而,CVAPS利用支持向量机(support vector machine,SVM)[13 -14 ] 来估计遥感图像像素的后验概率向量,易受到遥感图像中同物异谱、异物同谱、混合像元等因素的影响,从而难以准确估计复杂像元后验概率向量的强度和方向,并影响了其后多元变化检测的精度[15 ] .为解决这一问题,李轶鲲等[16 18 ] 结合模糊C均值聚类(fuzzy C-means,FCM)和上下文敏感的贝叶斯网络(context-sensitive Bayesian network,CSBN),提出了FCM-CSBN-CVAPS方法.该方法通过建立像素与多种地物之间的随机链接,能够有效处理同物异谱、异物同谱及混合像元等问题,从而提高了变化检测的准确性和鲁棒性.因此本文基于CSBN估计后验概率变化向量,实现了更为精确的多元变化检测.在多元变化检测方法中,SVM-CVAPS根据后验概率变化向量与标准变化向量的最大相关程度(maximum correlation,MC)来判断变化类型[15 ] .然而,较多的地物类型会生成过多的标准变化向量,这些标准变化向量互相干扰,大大降低了多元变化检测的精度. ...
A threshold selection method from gray-level histograms
1
1979
... 基于CSBN,本文提出了一种多模式结合的变化检测算法(FCM-CSBN-CVAPS-AT),其总体流程如图1 所示.首先,通过FCM提取两时相遥感影像中的信号类,并通过CSBN估计双时相遥感图像的像素级后验概率向量,并在此基础上使用CVAPS生成后验概率变化强度图;其次,使用Otsu法[19 ] 计算变化阈值,生成变化二值图,再经过形态学处理,去除细小相斑和孔洞,生成优化后的变化二值图;最后,针对变化区域,利用AT法计算像素后验概率变化向量与某一标准变化向量的夹角,当夹角小于一定阈值,则判定该像素为标准变化向量所代表的变化类型,从而实现HRRS影像的多元变化检测.由于FCM-CSBN-CVAPS将空间信息融入后验概率向量的估计过程,并使用后验概率向量而不是使用分类图进行变化检测,因此,提出的算法对累积分类误差更具鲁棒性. ...
Unsupervised deep change vector analysis for multiple-change detection in VHR images
1
2019
... 本文使用的影像数据来自SenseEarth平台数据集(地址为: https://rs.sensetime.com/ ),空间分辨率为3 m,影像尺寸为512像素×512像素.遥感影像经过了辐射校正、几何纠正和图像配准预处理操作.研究区1实验影像共包括1类地物变化类型,为林地到荒地;研究区2实验影像共包括2类地物变化类型,分别为建筑物到荒地、建筑物到林地;研究区3实验影像共包括3类地物变化类型,分别为荒地到建筑物、林地到建筑物、建筑物到荒地.各研究区总地物类型数量和变化类型数量如表1 所示.算法运行环境为 13th Gen Intel Core i7-13700KF 3.42 GHz,32 GB内存,16核24线程处理器.为了验证方法的有效性,本文选用FCM-SBN-CVAPS-AT,SVM-CVAPS-AT,FCM-CSBN-CVAPS-MC,FCM-SBN-CVAPS-MC,SVM-CVAPS-MC,FCM-CSBN-PCC和DCVA[20 ] 算法作为对比算法,同本文提出的FCM-CSBN-CVAPS-AT算法进行比较. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}