

0 引言
传统的道路障碍物信息获取方式主要是依靠人工实地勘察[12],存在耗费大量人力物力、数据组织困难、信息化程度低、实时性差等弊端。随着遥感技术的发展,现在我国的民用卫星空间分辨率已达到亚m级[13,14],通过组网,我国高分系列卫星实现了对我国陆地区域2 d重访观测[15],计划到2020年我国吉林一号视频卫星星座将能实现平均30 min以内的重访能力[16]。因此,遥感手段能为自然灾害应急快速响应提供有力支持。目前使用遥感技术进行道路损毁检测评估主要有3种方式: 人机交互解译[17,18,19,20,21]、基于图像分类的机器解译[22,23,24,25,26]以及基于变化检测的机器解译[27,28,29,30]。通过人机交互解译的方式进行损毁评估可靠性高,但是自动化程度低,工作量大; 基于图像分类的方法可对道路障碍物提取结果进行定性分析,但是该方法的精度依赖于分类的精度; 基于变化检测的方法检测精度取决于配准精度,且需要进一步解译检测结果才能获得较为准确的障碍物信息。
针对现有道路损毁遥感检测技术存在的自动化程度低、配准困难、需要具有专业知识的人员操作等不足,本文尝试提出一种基于反向特征匹配的方法来自动、快速检测因自然灾害而产生的道路障碍物。首先,对路损前后的遥感影像分别计算尺度不变特征变换(scale-invariant feature transform,SIFT)特征点集并实施特征匹配,对匹配结果取反得到变化信息特征点集; 然后,使用道路缓冲区筛选得到道路区域内变化信息特征点集,通过滑动窗法筛除伪变化点和微小变化点; 接着,进行特征点分组合并,得到障碍物位置信息,再结合区域生长法得到障碍物范围并进行面积估算; 最后,将提取出的障碍物与道路矢量数据叠置分析来进行通过性评价。本文将特征匹配技术应用于变化检测,以期无需进行影像配准即可提取出影像中路面障碍物的位置和面积信息,同时保证该方法的自动化程度。
1 道路障碍物特征点集提取
当灾害发生并损毁道路形成路面障碍时,在遥感影像上表现为灾害发生前后2期影像在路障区域发生了变化。因为影像特征点极具代表性地反映了图像的结构特征等信息,能够正确匹配的同名点代表了2幅影像中相同的结构,反之,无法匹配的特征点包含了2幅影像的差异信息。基于此特点,本文使用特征点反向匹配技术来提取道路障碍物,实质是通过筛选分析不能匹配的特征点集来检测路域的变化信息。
1.1 对比度增强
由于影像质量,特别是影像对比度高低对特征点检测结果的影响很大,因此在进行特征点检测之前需要对影像质量进行评估。影像方差对比度CMRMS[31]定义为
式中: N为图像总列数; L(i,j)为第i行、第j列像素的灰度值;
若CMRMS低于0.5则判定该影像质量不佳,需进行对比度增强。本文采用对比度受限自适应直方图均衡算法[32](contrast limited adaptive histogram equalization,CLAHE)来增强影像对比度。图1为影像对比度对特征点检测的影响示例,图中绿色圆圈为检测到的SIFT特征点。图1(a)和(c)为灾害发生前后的原始遥感影像,CMRMS均小于0.5,能提取到的特征点很少,图1(b)和(d)为经过CLAHE对比度增强后的2幅影像,提取到的特征点数显著增加。相较于常用的直方图均衡算法,CLAHE算法可以有效地限制噪声的放大及局部对比度的过度增强,避免因为灰度变换导致的影像失真以及局部信息无法突出的问题。
图1
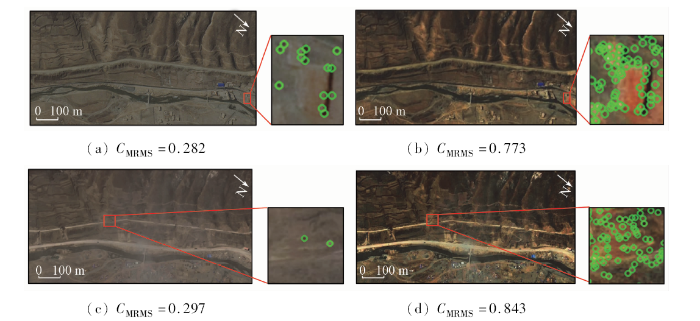
图1
影像对比度对特征点检测的影响
Fig.1
Influence of Image contrast on the feature points detection
1.2 反向特征匹配
由于SIFT算法对旋转、尺度缩放、亮度变化保持不变性,且对视角变化、仿射变换、噪声也具有一定程度的稳定性,所以本文采用SIFT算法检测影像特征点。除了上文分析的影像对比度会对特征点检测结果造成影响之外,影像空间分辨率也是一个重要的影响因素。构建影像金字塔是确定SIFT特征的基础,金字塔层数的计算公式为
式中M,N分别为图像的行、列数。依据式(2)可得,当octvs取最小值1时,min(M,N)=8,即影像行列数最小值不能小于8个像素。依据公路工程技术标准,我国山岭重丘地区四级公路最小路基宽度为6.5 m[33],因此若选用1 m以下空间分辨率的影像可能会导致路面特征点数目过少或定位不准确。
灾前灾后影像的SIFT特征点集分别记为P,Q。为保证后续障碍物特征点提取的准确性,本文使用比值提纯法减少误匹配,并使用随机抽样一致算法(random sample consensus,RANSAC)算法剔除离群匹配进一步提纯匹配结果,灾后影像中的可匹配点集记为Qm。
2幅影像的同名点代表了其相同的地物结构,而道路障碍物属于变化信息,其对应的特征点应包含在匹配不上的特征点集中。因此特征点匹配之后本文加入了一个取反的操作,即取点集Qm在Q中的补集作为影像变化信息特征点集Qu。
1.3 提取路域变化特征点集
灾害发生后,除了道路区域有变化,非道路区域也可能受灾变形,同时受地形、光照、拍摄季节、传感器位置等影响,影像中也可能存在一些“伪变化”信息,即Qu点集中既有道路障碍物信息,也可能有其他地物的变化信息,或是伪变化信息。为了排除与道路无关的变化信息,本文采用已有的道路矢量数据,综合考虑道路宽度与影像空间分辨率生成道路缓冲区感兴趣区域(region of interest,ROI),通过判断特征点与缓冲区多边形的位置关系,去除位于道路范围之外的特征点,得到道路缓冲区内的变化特征点集Qur。
1.4 障碍物特征点筛选
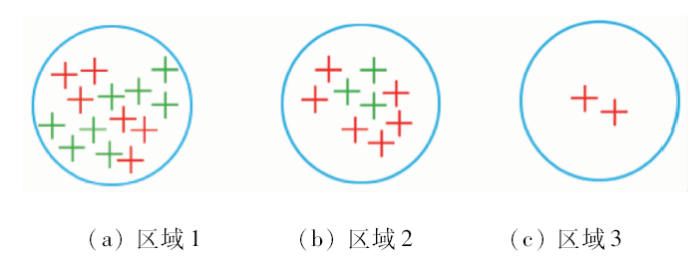
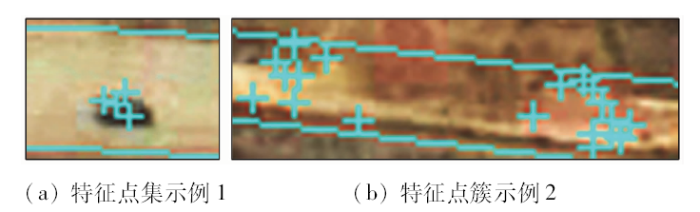
Qur中包含着形成实质堵塞的较大障碍物、没有实质影响的小障碍物,以及其他原因造成的路面伪变化的特征点。相对于滑坡、塌陷、断裂等影响通行的道路障碍物来说,伪变化在范围大小、变化特征点聚集度等方面相对要微小很多,以此为基础,通过分析特征点密度可以筛除一些非路障信息的干扰特征点。本文采用滑动窗口法,检测窗口选择半径r为15像元的圆形窗口,以每个未匹配特征点为圆心,统计窗口内未匹配特征点的数量N1以及所有特征点数量N2,并计算未匹配点占特征点总数的比例,也就是N1/N2的值,若N1≥n且N1/N2>m则保留窗口内特征点。n的取值与影像空间分辨率和纹理光滑程度有关,当空间分辨率高、纹理粗糙时检测到的特征点就多,此时n可取大一些,反之可取小,n取值一般在[3,6]之间; m一般取0.5。将Qur中的所有特征点筛选之后得到障碍物特征点集Qobs。
图2
2 道路障碍物定位及面积估算
灾害发生后,同一条道路上在不同位置可能有多处障碍点。前述过程得到了包含道路障碍物信息的特征点集Qobs,该点集中包含着道路上所有的障碍物特征点,接下来要根据这些特征点的分布特点对其进行分组以分离不同位置的障碍物。获得障碍物位置信息之后,通过区域生长法得到各处障碍物的形状信息并进行面积估算。
2.1 障碍物分组与定位
一条道路上可能会存在多处障碍物,因此简单地将所有特征点求平均得到的定位点可能是错误的。由于障碍物大小不同,以固定阈值进行分组有可能将属于同一处障碍物的特征点分进不同的组,因此分组后还需要进一步的调整才能获得正确的障碍物定位信息。
2.1.1 障碍物特征点分组
考虑到实际需要以及影像空间分辨率,本文设计了一种相邻点间距分组算法来实施同路段障碍物特征点的分离,即设置一个阈值R,相邻点间距小于阈值的归为同一个障碍物,相邻点间距大于阈值的则属于不同的障碍物。图3为过程示意图。
图3
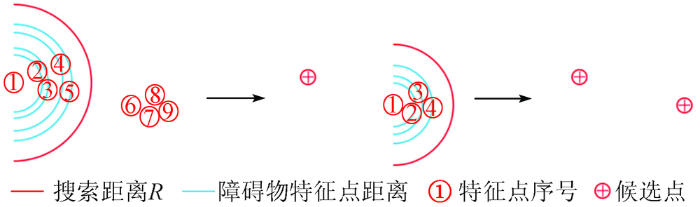
1)确定道路方向。由道路中线数据可计算得到该路段中线的倾斜角θ(θ∈[0,π))。若θ∈[π/4,3π/4],则规定该路段方向为垂直方向。若θ∈[0,π/4)∪(3π/4,π),则规定该路段方向为水平方向。图3所示即为水平方向。
2)特征点排序。垂直方向路段的特征点依y坐标排序,水平方向路段的特征点依x坐标排序。
3)从第一个点开始向后查找,相邻两点间距不超过R,则均属同一组,直到查找到某一点q,在这一点之后R距离的范围之内没有其他特征点存在(如图3左图中⑤),则第一组搜索完成。
4)取组内所有特征点坐标的中值作为该障碍物的候选坐标点Oi。并将下一特征点作为第一点重复步骤3)和4)直至检查完Qobs中的所有特征点。
2.1.2 障碍物定位
上述分组方法存在一个问题,由于障碍物特征点多分布于灰度跳变处,即路障边缘处,则当障碍物长度大于阈值R时,该处障碍物的特征点很可能被分成了2组,如图4所示。由图可见这样得到的障碍物坐标点左右两侧的性质相异,靠近路面的一侧特征与路面相似,反之则与障碍物相似。于是本文设计了一种相似性对比的方法来解决这个问题。
图4
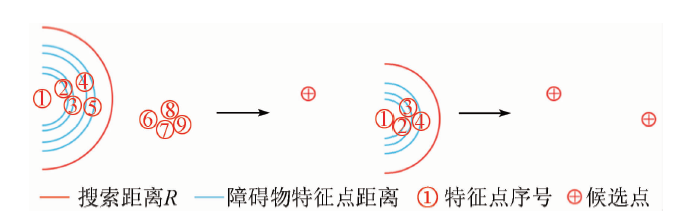
图4
相同障碍物两侧特征点识别归并
Fig.4
Recognition and merging of feature points on different side of the same obstacle
1)确定前进方向。在2.1.1中已得到了道路方向并将特征点依坐标进行了排序。则依影像坐标系,规定水平方向的道路前进方向为X轴正向,垂直方向道路为Y轴正向。
2)获取标准道路样本。使用2.1.1得到的障碍物坐标点集O来截取道路中线,截取路段距离障碍物点R/2的距离以避免取到路障像素点。以取出的道路中线上的每一点为中心,取其八邻域作为一个道路样本。统计所有道路样本的均值和方差,由这2个统计量对样本进行排序,取统计量众数对应的样本为标准路面样本。图5为该步骤示意图。
图5
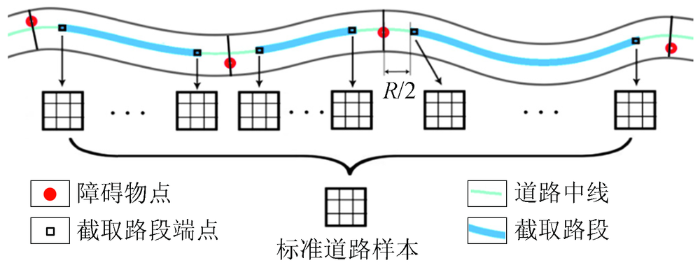
图6
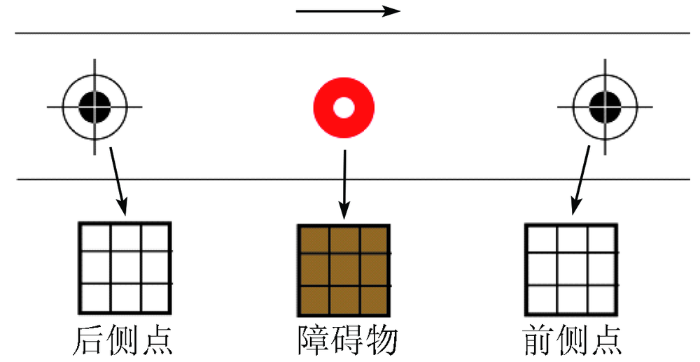
表1 障碍物候选点的性质
Tab.1
| 标注 | 后侧点 | 前侧点 |
|---|---|---|
| +1 | 与路面相似 | 与障碍物相似 |
| -1 | 与障碍物相似 | 与路面相似 |
| 0 | 与路面相似 | 与路面相似 |
| 0 | 与障碍物相似 | 与障碍物相似 |
4)合并。沿道路前进方向若遇到两连续的坐标点性质分别为+1和-1,则判定这2点为位于同一障碍物两侧的点,取其坐标的平均值作为该处障碍物的定位点。得到最终障碍物定位点集Robs。
2.2 障碍物面积估算
由前面步骤已获得较准确的障碍物定位点,取定位点作为种子点采用区域生长法以期获得障碍物大致分布情况。由于障碍物内部不均质,仅取定位点作为种子点的生长效果不佳,因此采用多种子点区域生长法: 将定位点、与标准道路样本均值之差小于阈值的邻域点均作为种子点; 待生长点与任意种子点之差小于阈值即满足生长条件。
生长结束后即可获得障碍物的分布范围,统计每处障碍物位于道路区域内的像素数,结合影像空间分辨率即可估算出每处障碍物的实际占地面积。
3 路段通过性评价
表2 通过性评价
Tab.2
| 情形 | 双边线 | 路中线 | 通过性 |
|---|---|---|---|
| 1 | 双侧相交 | 相交 | 完全封闭 |
| 2 | 单侧相交 | 相交 | 部分通行 |
| 3 | 单侧相交 | 不相交 | 畅通 |
| 4 | 不相交 | 相交 | 部分通行 |
| 5 | 不相交 | 不相交 | 畅通 |
若障碍物将道路完全截断,则该处障碍物应与道路双边线都相交; 若只是部分截断,则可能只与中线和单侧边线相交; 若只与单侧边线相交,则该处障碍物基本不会对该路段通行造成影响。
4 实验与分析
4.1 亚m级空间分辨率影像实验结果
实验影像来源于Google Earth,为玉树地震发生前后的2期影像,空间分辨率为0.5 m。影像上该路段存在山体滑坡、道路塌陷、断裂等类型的堵塞点。实验所用矢量数据来源于OpenStreetMap。图7为经过CLAHE对比度增强后的灾后影像,图上叠加了由矢量数据生成的道路缓冲区。经人工解译,图上共有10处道路障碍点。
图7
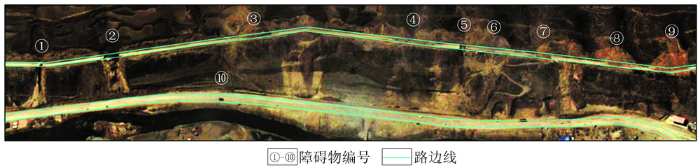
图8
2)获取障碍物特征点集。使用圆形滑动窗口筛选障碍物特征点集,各参数为r=15个像素,n=5(窗口内未匹配点数大于等于5),m=0.5(未匹配点数占特征点总数的一半以上),如图9所示。
图9
3)计算障碍物候选点坐标。本文设相距10 m以内的障碍点不予以区分,由于实验影像空间分辨率为0.5 m,则阈值R=20。由道路矢量数据计算得到道路为水平走向,所以将障碍物特征点集Qobs依x坐标进行排序,按R将Qobs分成了15个组,各组内求中值后得到15个障碍物候选点(图10)。
图10
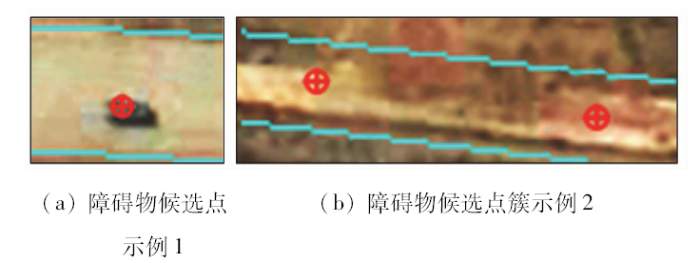
表3 候选点性质的标定结果
Tab.3
| 编号 | 障碍物坐标点标记 | 是否需要合并 |
|---|---|---|
| 1 | 0 | 否 |
| 2 | +1 | 否 |
| 3 | 0 | 否 |
| 4 | +1 | 是 |
| 5 | -1 | |
| 6 | 0 | 否 |
| 7 | 0 | 否 |
| 8 | +1 | 是 |
| 9 | -1 | |
| 10 | +1 | 是 |
| 11 | -1 | |
| 12 | +1 | 是 |
| 13 | -1 | |
| 14 | 0 | 否 |
| 15 | 0 | 否 |
5)障碍物分布与面积确定。得到准确的障碍物定位点之后就可以通过多种子区域生长法得到每处障碍物的形状信息,图11中白色部分为障碍物分布情况。从图11中可以发现,第⑪处障碍物没有生长结果,原因是第⑪处障碍物定位点的邻域与标准路面样本的相似性很高,没有找到合适的种子点,因此将该处障碍物的面积设置为0。其余10处障碍物通过统计其区域生长结果位于道路区域内的像素数进行面积估算,计算结果列于表4。实验区域内人工目视解译的障碍物有10处,利用算法提取的障碍物为11处,但算法也已自动将第⑪处障碍物的面积标定为0,所以总体上本文实验的检测准确率为100%; 面积估算平均误差小于10%。表4中参考面积为利用人工目视解译圈定的障碍物边界范围计算所得的面积。这里的面积是道路缓冲区边界与提取的障碍物边界构建的面积,可直接作为抢险土石方量的参考。实验所涉及的各参数阈值适用于0.5 m空间分辨率影像,除这些阈值需要人工调整外,其他过程已全部实现了自动化。
图11
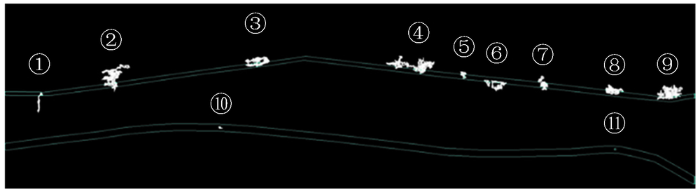
表4 障碍物提取结果
Tab.4
| 编号 | 坐标 | 计算面积/m2 | 参考面积/m2 | 误差/% |
|---|---|---|---|---|
| ① | (103,529) | 7.75 | 6.75 | 14.8 |
| ② | (290,502) | 23.75 | 27.75 | -14.4 |
| ③ | (697,447) | 36.50 | 37.00 | -1.4 |
| ④ | (1 146,464) | 33.75 | 40.25 | -16.1 |
| ⑤ | (1 280,481) | 15.50 | 13.25 | 17.0 |
| ⑥ | (1 366,494) | 34.25 | 34.50 | -0.7 |
| ⑦ | (1 500,506) | 20.25 | 22.00 | -8.0 |
| ⑧ | (1 691,526) | 23.00 | 24.50 | -6.1 |
| ⑨ | (1 841,538) | 39.50 | 41.25 | -4.2 |
| ⑩ | (599,621) | 8.00 | 7.25 | 10.3 |
| ⑪ | (1 698,682) | 0 | 0 | 0 |
图12
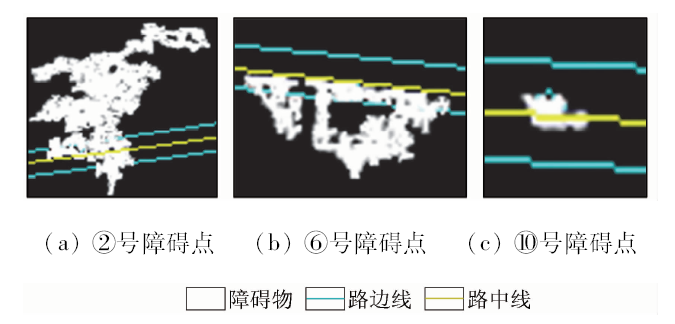
(b)处障碍物只与单侧边线相交,判断该路段可部分通行,相似的还有⑧号障碍点。(c)处障碍物只与路中线相交,判断该处障碍点可能为滚石类灾害。
4.2 m级空间分辨率影像实验结果
该实验影像空间分辨率为1 m,影像上存在2处滑坡堵塞点。图13为利用道路ROI提取路域变化特征点集的结果,由图可见提取到的特征点数目远少于亚m级空间分辨率的影像。
图13

图14
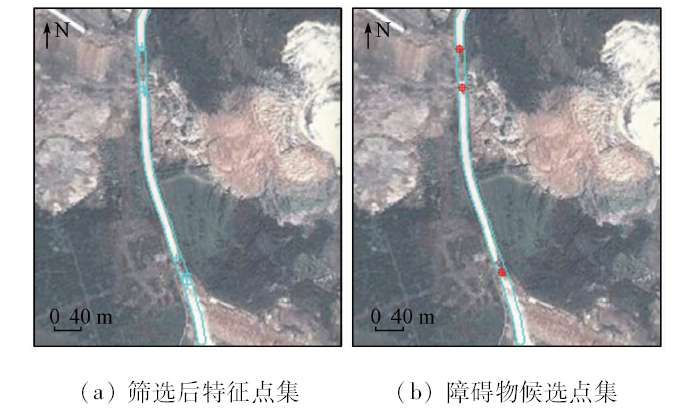
图15
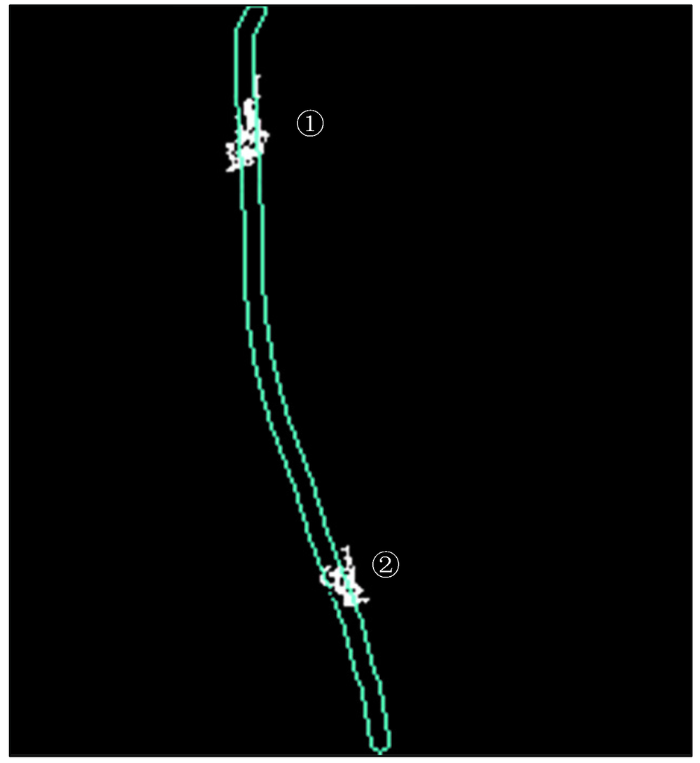
表5 障碍物的位置和面积信息
Tab.5
| 编号 | 坐标 | 计算面积/m2 | 参考面积/m2 | 误差/% |
|---|---|---|---|---|
| ① | (114,201) | 103 | 107 | -3.7 |
| ② | (82,43) | 67 | 76 | -11.8 |
5 结论
本文从特征匹配技术的优势入手,提出一种基于反向特征匹配法来提取道路障碍物的方法,得到以下结论:
1)针对变化检测技术中影像精确配准困难的问题,通过处理未匹配特征点来获取影像变化信息无需进行影像配准。但本方法不适用于空间分辨率低于1 m的影像。
2)为了降低虚警率,通过相似性检测的方法可有效确保每一处障碍物定位点的唯一性。
3)将障碍物边界提取结果与道路矢量数据作叠置分析进行障碍物面积计算实施路段通过性评价,具有可操作性,实验结果显示,障碍物面积的自动计算结果与人工解译结果间平均误差小于10%,可作为抢险时工程量计算的参考数据。
4)本文所提方法尚未考虑三维信息,尚不能识别障碍物的来源和性质,随着更多遥感数据源的应用,方法可进一步完善; 对于不同道路宽度、不同工程需求,方法中各个阈值的自适应设置将作为今后进一步的研究方向。
参考文献
2018年交通运输行业发展统计公报
[EB/OL].(
Development statistics bulletin of transport industry in 2018
[EB/OL](
山区公路事故多发点判别及安全设施设置研究
[D].
Study on the setting of safety facilities for accident prone points in mountain area
[D].
地震灾区公路隧道泥石流灾害分析及减灾对策
[J].
Analysis of debris flow hazard of highway tunnel in earthquake-strike area and mitigation countermeasures
[J].
地震区降雨作用下泥石流易发性动态评估
[J].
Dynamic assessment of debris-flow susceptibility under the influence of earthquake and rainfall events
[J].
地震诱发滑坡的快速评估方法研究:以2017年MS7.0级九寨沟地震为例
[J].
Study on the rapid evaluation method of earthquake induced landslides:Taking the Jiuzhaigou earthquake of MS7.0 in 2017 as an example
[J].
2018年地震滑坡机理与评估研讨会概述
[J].
Summary of 2018 Symposium on Mechanism and Assessment of Earthquake Induced Landslides
[J].
南方地区道路塌陷的成因分析、预防及治理
[J].
Cause analysis, prevention and treatment of road collapse in South China
[J].
近10年中国城市道路塌陷原因及防治对策分析
[J].
Analysis of reasons for urban road collapse and prevention and control countermeasures in recent decade of China
[J].
地震诱发崩塌滚石的运动特性及防护研究
[J].
Kinetic characteristics of rockfall induced by earthquake and the protective measures
[J].
公路边坡滚石灾害运动特征模拟及风险评估
[D].
Simulation of motion characteristics and risk assessment of rockfall hazard on highway slope
[D].
2018年全国地质灾害灾情及2019年地质灾害趋势预测
[EB/OL].(
2018 national geological disaster situation and 2019 geological disaster trend prediction
[EB/OL](
地质灾害群测群防系统设计与实现
[J].
Design and implementation of mass monitoring and mass prevention system of geological hazard
[J].
我国陆地定量遥感卫星技术发展
[J].
Development of China land quantitative remote sensing satellite technology
[J].
商业卫星遥感产业发展现状与趋势分析
[J].
Analysis of development status and trend of commercial satellite remote sensing industry
[J].
高分五号、六号卫星正式投入使用
[J].
GF-5 and GF-6 satellites are officially put into use
[J].
遥感视频卫星应用展望
[J].
Application of earth observation system of video satellite
[J].
卫星遥感技术在公路交通领域的应用
[J].
Application of satellite remote sensing technology in the field of highway transportation
[J].
利用国产遥感卫星进行金沙江高位滑坡灾害灾情应急监测
[J].
Emergency monitoring of high-level landslide disasters in Jinsha River using domestic remote sensing satellites
[J].
基于多光谱遥感的新疆皮山6.5级地震灾情监测与分析
[J].
Monitoring and analysis of Xinjiang Pishan earthquake with MS6.5 disaster damage using multi-spectral remote sensing
[J].
基于高分辨率影像的九寨沟7.0级地震道路震害评估
[J].
Assessment of road seismic damage for the Jiuzhaigou MS7.0 earthquake based on high resolution image
[J].
遥感技术在广东省丰顺县地质灾害详细调查中的应用
[J].
The application of rs technique for detailed investigation of geological hazards in Fengshun Country of Guangdong Province
[J].
Road damage extraction from post-earthquake UAV images assisted by vector data
[C]//
半自动面向对象高分遥感地灾目标提取方法
[J].
Semi-automatic object-oriented geological disaster target extraction based on high-resolution remote sensing
[J].
基于卷积神经网络的道路障碍物检测算法
[J].
Road obstacle detection algorithm based on convolutional neural network
[J].
卫星遥感在滑坡识别中的应用
[J].
Application of satellite remote sensing in landslide identification
[J].
基于SAR图像的道路损毁信息提取
[J].
Road damage information extraction based on high-resolution SAR imagery
[J].
高分辨率航摄影像城市交通设施变化检测方法研究
[J].
Resarch on detecting change of urban traffic facilities with high resolution aerial images
[J].
Road damage detection from VHR remote sensing images based on multiscale texture analysis and dempster shafer theory
[C]//
一种基于线特征的道路网变化检测算法
[J].
A road network change detection algorithm based on linear feature
[J].
基于SAR图像的道路损毁信息提取方法研究
[D].
Method research of damaged road information extraction based on SAR images
[D].
基于对比度受限自适应直方图均衡的乳腺图像增强
[J].
采用对比度受限自适应直方图均衡对乳腺图像进行增强,有效地增强了乳腺图像中的细节,如钙化点、乳导管等组织;并通过对算法中相关参数研究,得到应用于乳腺图像增强的参数优选值,以求获得较好的增强效果,为医师分析影像提供方便。通过与灰度直方图均衡的结果进行比较得出:对比度受限自适应直方图均衡为乳腺数字图像增强的有效方法,在计算机辅助乳腺诊断方面有较高应用价值。
Mammary image enhancement based on contrast limited adaptive histogram equalization
[J].
基于多指标与支持向量回归的道路监控图像质量检测方法
[J].
A detection method of road monitor image quality based on multi-index and support vector regression
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}