

0 引言
在进行无人机航空物探航高规划时,必须掌握地形信息及电力线和电力杆塔等地障信息,因此数字地形及三维地障信息是无人机三维航迹规划软件极重要的一种基础数据。目前,获取地形信息的方法主要有地面外业测量、地形图数字化、光学摄影测量、合成孔径雷达(synthetic aperture Radars,SAR)测量、激光雷达(light detection and ranging,LiDAR)测量等,其中除了LiDAR技术之外,其他方法均很难在获取数字地形的同时快速获取电力线等细小地物的三维信息。
随着无人机技术的发展,国内外越来越多的研究学者开始利用低空LiDAR技术进行电力线安全距离的检测。无人机LiDAR测量系统可快速采集线路走廊高精度三维激光点云数据,进而获得高精度三维线路走廊的地形地貌、地物和线路设施的空间信息。相比于航拍影像,LiDAR数据在电力行业应用精度高、目标易识别。目前很多学者对通过LiDAR数据提取电力线等地障信息进行了深入研究,提出了各类提取方法。利用二维Hough变换提取电力线,通过对点云进行预处理后投影到二维平面,利用影像处理技术提取电力线[3]。根据电力线空间特性,采用聚类方法设置特征阈值提取单根电力线,并基于抛物线模型实现电力线三维空间构建[4]。选取多个特征基于监督分类方法,构建分类器进行电力线走廊分类[5]。
本文将围绕无人机三维航迹规划和自主避障的需求,研究基于无人机LiDAR点云数据的三维地障信息提取技术。首先,对原始点云数据进行地面滤波,分离地面点和非地面点; 然后对非地面点通过分析其点云的几何特征以及分布特征,实现电力线、电力杆塔和高植被等地物的提取; 借鉴拟合聚类分析提取单根电力线,根据电力线自然悬垂特性,构建抛物线模型,利用每条电力线上点云数据拟合模型参数,完成电力线的三维建模[6]; 最后利用点云距离计算方法设定安全缓冲区域,为无人机三维航迹规划避障提供基础地障信息。
1 研究方法
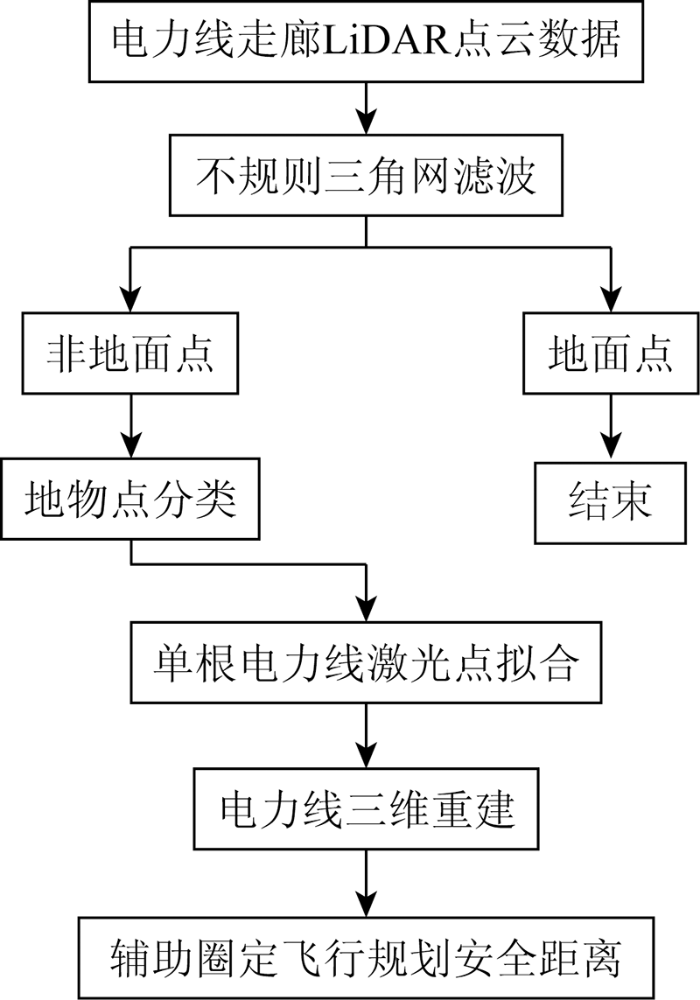
本文所研究的电力线提取及安全区域检测的方法流程如图1所示。主要包括对无人机LiDAR点云数据进行地面滤波,区分地面点和非地面点,完整提取电力线点和电力杆塔等地物信息,并三维重建电力线走廊,根据提取的电力线矢量计算树木点与电力线的距离,建立无人机飞行规划的自主避障安全缓冲区,作为基础数据输入到飞行轨迹规划软件。
图1
1.1 点云分类
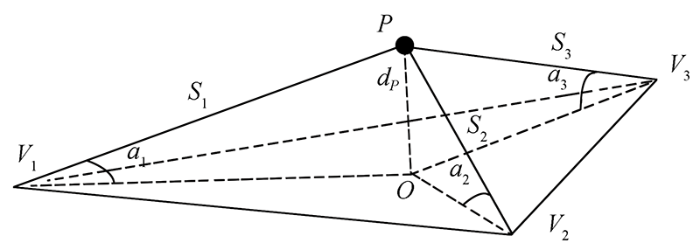
1.1.1 地面点分类
图2
1.1.2 电力线点云分类
电力线点云数据三维建模,关键是要将点云数据中的电力线点提取出来。试验区的非地面地物主要包括植被、电力线和电力杆塔。为了从非地面点中分离出电力线点云,需要根据电力线在激光点云数据中的主要特性,设计相应的分类规则(图3)。
图3
根据特性④电力线点云主要集中在雷达的首次回波中,可提取非地面点云的首次回波激光点作为待分类数据,这样可预先滤除一部分植被点。接下来,手动构建中心塔线,即人工手动以每个电力杆塔中心为端点,构建中心线; 以此中心线为计算初始值,设定搜索范围、距离和角度阈值,利用区域生长算法进行导线追踪,实现电力线点云的提取。本次试验判断是否为电力线点选取多种特征综合判断,选择了基于高程特征、基于角度特征和基于距离特征进行电力线点云分类(表1)。最后利用加载的电力杆塔文件,设定以电力杆塔位置为基准的搜索范围,实现对电力杆塔的划分,余下的非地面点云即为植被。
表1 电力线点云特征描述
Tab.1
| 特征 | 符号 | 特征描述 | 可区分类别 |
|---|---|---|---|
| 高程 | H | 基于电力线点云间高程变化小,以中心线为基准设定搜索范围格网,格网高程差在一定阈值范围内 | 电力线、植被 |
| 角度 | J | 基于电力线水平方向投影呈平行线特性,设定点云间最小角度阈值 | 电力线、植被 |
| 距离 | D | 基于电力线线性延伸特征,判断2个点之间距离不超过阈值 | 电力线、电力杆塔 |
1.1.3 分类结果手动编辑
由于实际地表的复杂性,电力线和电力杆塔形态特征的多样性,要实现从无人机LiDAR点云数据中准确地自动提取电力线和电力杆塔等地障信息难度非常大。而无人机低空飞行是一项安全要求极高的工作,对三维航迹规划的准确性要求极高。为了保障无人机LiDAR地障信息的准确性,基于无人机LiDAR的地障信息手动分类技术仍必不可少(图4)。
图4
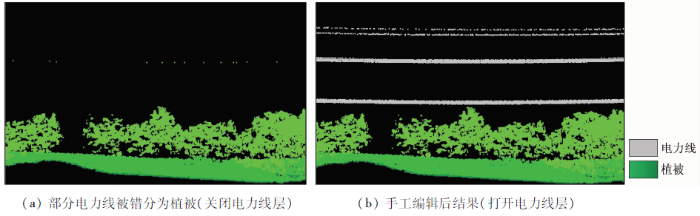
基于上述的分类方法处理后,对试验区非地面点的分类结果开展手动编辑工作,特别检查区域内电力线点和高植被点。关闭电力线点云层后发现,有稀疏电力线点误分为植被(图4(a))。参照区域内影像信息,根据电力线在局部高程基本相同,而植被高程一般具有起伏较明显的特征,对电力线和高植被点云进行人工检查,对误分点进行手工编辑,确保每个点云被正确分类。
1.2 电力线激光点云拟合
点云分类得到的电力线并不是连续的直线,而是由许多离散的点组成,近似为直线; 并且单根电力线相邻点云间距离差很小。利用这些特性,对分类后的电力线点云数据进行聚类分析,拟合识别每根电力线上的点云数据。设定同一根电力线相邻2点的空间距离d,电力线之间点的空间距离D,D远大于d,通过比较点与点之间的距离,即可识别出属于同一根电力线上的点云数据[6]。具体步骤如下: ①导入电力杆塔文件,以每个电力杆塔中心点为基准构建中心塔线,量测中心塔线至最外端电力线距离,构建包含2个电力杆塔间电力线区域的最小搜索矩形范围。②从电力线中选择一点作为种子点p,一般选取区域最边端点。③依次遍历搜索范围内剩下所有点pi与p点的空间距离Δd,计算公式为:
式中: Xpi,Ypi,Zpi为点pi的三维坐标; Xp,Yp,Zp为点p的三维坐标。④设置距离阈值s,该值小于搜索范围内不同电力线间空间距离的最小值。当Δd<s,则将该点存入p点的电力线数组中,每个电力线数组代表同一根电力线点云数据。⑤一次循环结束后,选取Δd最大的点标记为新的种子点,重复以上步骤,直至搜索范围内所有电力线点均标识完成所属哪根电力线数组。
1.3 电力线三维建模
电力线在2个电力杆塔之间呈自然悬垂线状,可根据此特征对电力线进行曲线拟合,其数学模型可选用抛物线模型进行拟合,多项式公式为:
1.4 航迹规划设计
由于无人机在复杂地形条件下开展高精度航空物探测量需要低空沿地形缓起伏飞行才能够获取高质量的数据,要求飞行器具备躲避地障能力并沿制定测线随地形超低空起伏飞行的能力。针对复杂多变的地形,对激光点云数据开展分类处理,生成地形数据,并提取出地障信息(电力线等)。结合地形模型和提取出的地障信息,编制用于基于三维地障信息的测线航迹规划方案。航迹规划方案主要包括测网设计、航高规划2个方面。
1)测网设计。以测区平面坐标及地形数据为输入因子,依据无人机的爬升率和下降率,得到匹配无人机爬升能力的高程曲面数据,进而提取出可以用于自主导航的航路点三维路径数据。首先,用2组正交的平行线布满整个测区,设计形成二维测网。一组为测线,一般情况下,主测线方向应垂直于或基本垂直于测区内的主要地质构造走向,测线间距根据测量比例尺确定; 另一组为控制线,方向一般垂直于测线方向,间距一般为测线间距的10~20倍。然后,从点云数据生成的地形模型提取出测区的地形剖面数据。最后,根据地形文件及所设计的二维测网,通过计算交叉点得到起伏曲面,完成三维测网输出(图5)。
图5
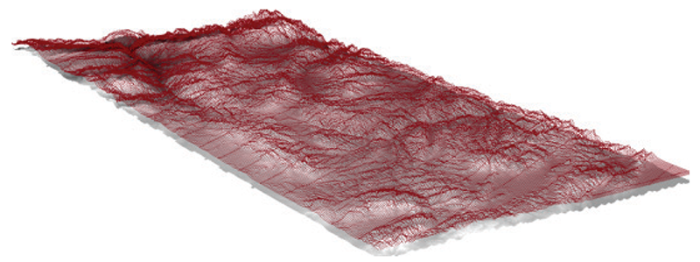
图5
利用点云地形信息创建三维测网
Fig.5
Create a 3D survey network using the point cloud terrain information
2)航高规划。为了获取高质量的测量资料,一般要求飞行器沿制定测线依地形超低空起伏飞行,无人机必须与地面以及一些地障地物(电力线等)保持足够的安全距离,才能有效地降低触地概率。因此,对于航空物探应用领域,无人机路径规划的重点和难点在于航高规划。分类后的电力线点云三维建模后,可量测电力线与附近地物间距离,通过设定距离地障的最小安全距离,进行安全缓冲区界定,为超低空沿地形起伏飞行规划提供基础参考数据。以2个电力杆塔之间的电力线中间点作为中心点,以中心点为基准,安全距离为半径做一个平行于X轴、Y轴的二维缓冲区,其中安全距离以实际工程要求为准,飞行规划设计时应确保航线轨迹严格避让开缓冲区。生成矢量文件,并设定合理的航高信息,作为基础信息参考文件导入飞行规划软件中。
2 试验与分析
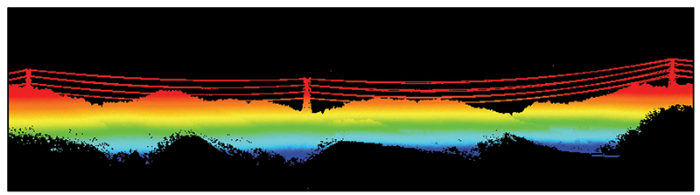
为了验证本文方法的可行性,本文采用某区域无人机激光数据进行试验。该数据为一段电力线走廊数据,其中包括8条电力线、2个电力杆塔。单次激光脉冲最多记录3次回波信号,点云间距为0.07 m,同档电力线相隔距离约为1 m。导入点云数据,试验区点云数据示意图如图6所示。
图6
2.1 点云分类
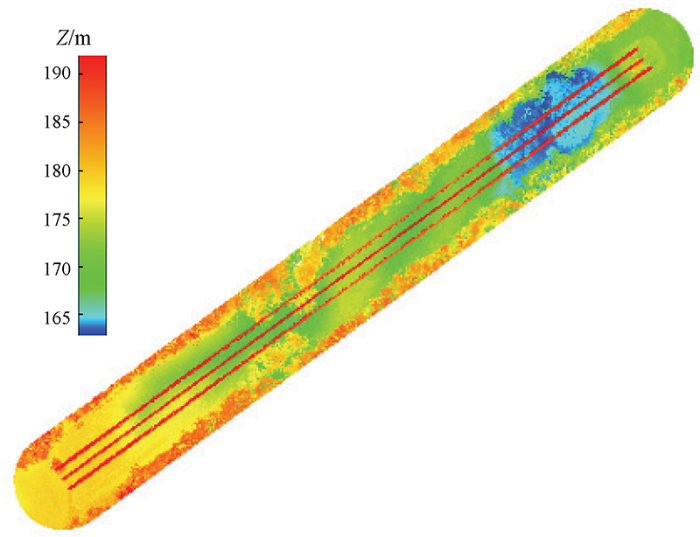
通过对数据初步分析,测试数据中的非地面点主要包括植被、电力线、电力杆塔等地物。首先利用不规则三角网滤波算法对试验区点云进行滤波处理,提取出地面点,分离开地面点和非地面点。其中点与三角网表面的距离设定为2 m、夹角参数设定为5°,利用提取出来的地面点构建地面高程模型(digital elevation model,DEM),结果如图7(a)所示。 然后对非地面点进行分类,从滤波结果中可以看出电力线在局部小面积区域内的高程基本相同,而植被之间高程比较起伏。根据电力线空间特性,构建高差、角度和距离特征向量,综合多种特征规则识别出电力线点云[15,16]。分离出的电力线点中含有少量误分的植被点,需要通过手工编辑检查修改分类结果,人工对点云数据进行类别编辑,划定出电力线、电力杆塔和植被点,确保点云分类结果正确,非地面点分类结果如图7(b)所示。
图7
2.2 电力线提取与三维建模
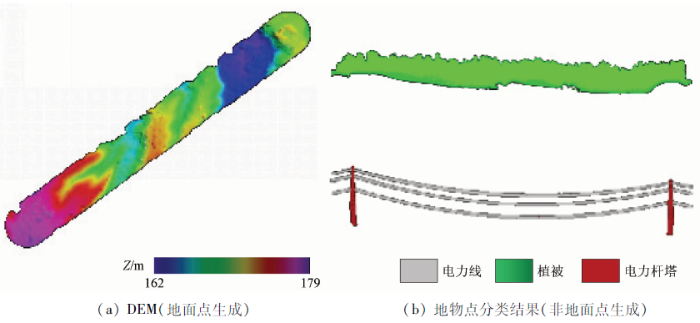
为了将点云中各条电力线分离,自动识别同一条电力线上的点,以便电力线的三维建模。将分类后电力线点云进行聚类拟合分析,提取得到8条电力直线。在处理过程中,为了确保每条电力线都得到有效提取,需要预先量测2条电力线最小间距,本次测试数据中各电力线间距最小为0.35 m,则距离阈值取0.3 m,将电力线点云中每个点归属到各自的电力线数组中(图8)。通过导入电力杆塔位置,利用2个电力杆塔之间的各条电力线点进行抛物线模型的参数拟合,构建电力线三维模型,如图9所示。并对自动提取的电力线进行精度评估,在2个杆塔之间沿电力线均匀选取10个位置,量测每个位置拟合电力线与点云之间距离(表2)。试验结果表明,水平距离差平均约为0.06 m,垂直距离差平均约为0.09 m,误差均较小,电力线拟合精度较高,满足后续航迹规划分析要求。
图8
图9
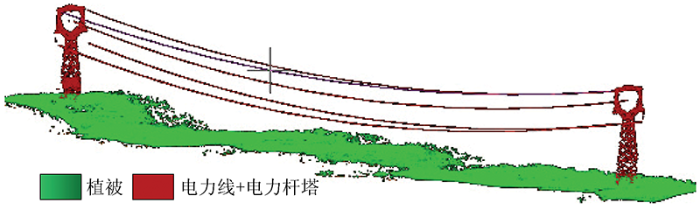
表2 电力线拟合精度
Tab.2
| 位置点 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 平均值 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 水平距离 | 0.09 | 0.06 | 0.12 | 0.02 | 0.05 | 0.09 | 0.06 | 0.07 | 0.02 | 0.03 | 0.06 |
| 垂直距离 | 0.23 | -0.22 | -0.26 | -0.23 | -0.2 | 0.24 | 0.22 | -0.11 | -0.29 | -0.25 | 0.09 |
2.3 航线规划设计
将地形数据结果导入物探飞行规划软件中,可在三维模型场景中根据线路避开地障(如电力线等)的安全运行距离,设定航高规划,根据地形数据和航高规划生成飞行线路的三维测网文件(图10)。
图10
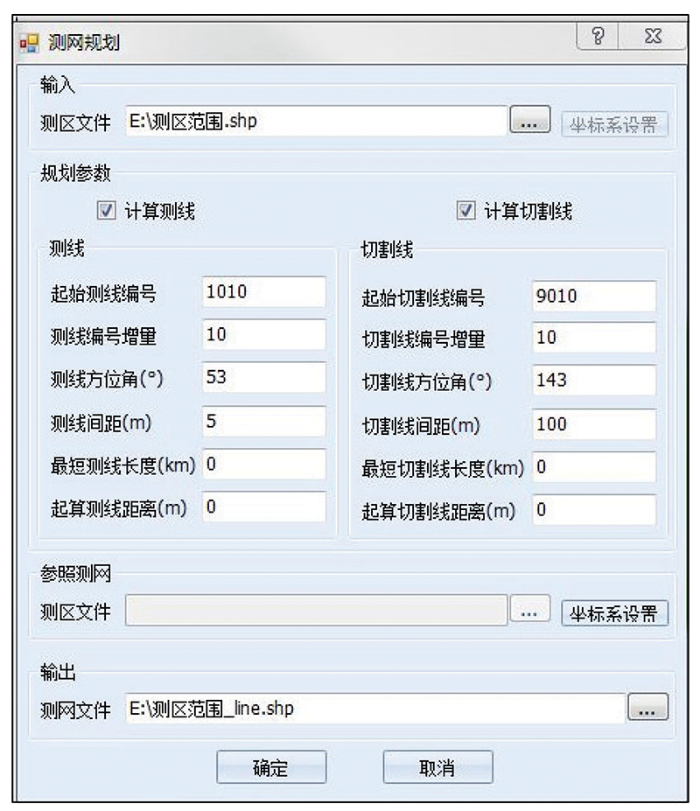
图10
飞行规划三维测网输出示例
Fig.10
Example of flight planning 3D measuring network output
在此飞行规划设计中,可分析判断飞行规划线路是否有效避开了植被、电力线、电力杆塔等地障地物。由三维测网的统计数据可以看出(表3),设计测线与地形匹配效果较好,测线均沿地形起伏飞行,且均高于地形数据,无穿插等现象。
表3 航线飞行高度-地形统计(部分)
Tab.3
| 距第一点距离 | 地形高程 | 飞行高程 | 离地高度 |
|---|---|---|---|
| 0 | 177.0 | 318.6 | 141.6 |
| 0.5 | 177.0 | 318.6 | 141.6 |
| 1.0 | 177.0 | 318.7 | 141.7 |
| 1.5 | 177.8 | 318.8 | 141.0 |
| 2.0 | 178.0 | 318.8 | 140.8 |
| 2.5 | 178.0 | 318.9 | 140.9 |
| 3.0 | 178.0 | 318.9 | 140.9 |
| 3.5 | 178.0 | 319.0 | 141.0 |
| 4.0 | 178.0 | 319.1 | 141.1 |
| 4.5 | 178.8 | 319.1 | 140.3 |
| 5.0 | 179.0 | 319.2 | 140.2 |
| 5.5 | 179.0 | 319.2 | 140.2 |
| 6.0 | 179.0 | 319.3 | 140.3 |
| 6.5 | 179.0 | 319.4 | 140.4 |
| 7.0 | 179.0 | 319.4 | 140.4 |
| 7.5 | 179.0 | 319.5 | 140.5 |
| 8.0 | 179.0 | 319.5 | 140.5 |
| 8.5 | 179.0 | 319.6 | 140.6 |
| 9.0 | 179.0 | 319.7 | 140.7 |
| 9.5 | 179.0 | 319.7 | 140.7 |
| 10.0 | 179.0 | 319.8 | 140.8 |
| 10.5 | 179.0 | 319.8 | 140.8 |
| 11.0 | 179.0 | 319.9 | 140.9 |
| 11.5 | 179.0 | 320.0 | 141.0 |
| 12.0 | 179.0 | 320.0 | 141.0 |
| 12.5 | 179.0 | 320.1 | 141.1 |
| 13.0 | 179.0 | 320.1 | 141.1 |
| 13.5 | 179.0 | 320.2 | 141.2 |
| 14.0 | 179.0 | 320.3 | 141.3 |
| 14.5 | 179.0 | 320.3 | 141.3 |
| 15.0 | 179.5 | 320.4 | 140.9 |
飞行高度变化与地形起伏呈现出一致的关系,说明测量飞行时无人机能够依地形缓起伏飞行,并安全避开了地障地物。实际飞行时不会出现风险,安全系数较高,符合要求(图11)。
图11
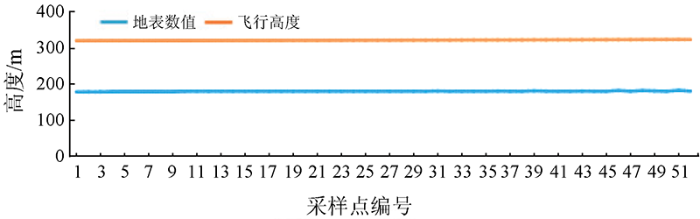
图11
测试区飞行高度与地形剖面
Fig.11
Flight height and topographical profile of the test area
3 结论
结合无人机LiDAR电力线点云数据空间分布的基础上,提出了一种基于激光点云数据的电力线提取方法,并将提取的结果应用于后续无人机物探应用飞行规划的安全距离诊断中。该方法利用点云在电力线上呈现的特点,设计和应用相应算法,实现电力杆塔之间电力线的自动提取与三维建模,并对电力线进行安全检测。试验结果表明,该方法可以对电力线点云数据进行有效提取,拟合的电力线与点云数据具有较好的吻合性,安全距离检测方法与后续无人机飞行规划软件兼容性较好,具有一定的应用价值。但在实际测试中也发现,目前有部分操作处理需要人工交互,属于半自动化形式,并且此次测试数据量不大,还需提高安全检测的工作效率,因此该方法还有待改进的空间。
志谢: 感谢中科北纬(北京)科技有限公司张乐工程师、石贤兵工程师在测试过程中提供的技术支持。
(责任编辑: 陈理)
参考文献
新型无人机航磁系统在多宝山矿区的应用试验
[J].
Trial survey of a novel UAV-borne magnetic system in the Duobaoshan ore district
[J].
自主技术无人机航空物探(磁/放)综合站研发进展
[J].
The progress in the development of the integrated UAV magnetic and radiation survey system
[J].
机载LiDAR点云数据中电力线的提取方法研究
[J].
Powerlines extraction techniques from airborne LiDAR data
[J].
基于固定翼无人机激光雷达点云数据的输电线路三维建模与树障分析
[J].
3D modeling and tree barrier analysis of transmission lines based on LiDAR point cloud data of fixed wing UAV
[J].
Point-based classification of power line corridor scene using random forests
[J].
基于激光点云数据电力线的提取及安全检测
[J].
Extraction and security detection of power line based on Laser point cloud data
[J].
电力巡线中机载激光点云数据处理的关键技术
[J].
Key technologies of airborne Laser point cloud process in power line patrol
[J].
利用无人机LiDAR点云数据进行电力线危险点检测
[J].
Powerline danger point detection using UAV LiDAR point cloud
[J].
DEM generation from Laser scanner data using adaptive TIN models
[J].
基于机载激光雷达点云的飞行障碍物提取方法研究
[J].
Extracting flying obstacles using airborne LiDAR point cloud data
[J].
基于机载LiDAR点云滤波的矿区DEM构建方法
[J].DOI:10.6046/gtzyyg.2015.01.10 [本文引用: 1]
Method of deriving DEM in the mining area based on filtering of airborne LiDAR data
[J].DOI:10.6046/gtzyyg.2015.01.10 [本文引用: 1]
基于渐进三角网的机载LiDAR点云数据滤波
[J].
Filtering of airborne LiDAR point cloud data based on progressive TIN
[J].
一种基于机载LiDAR点云电力线自动提取方法
[J].
An extraction algorithm of power lines from airborne LiDAR point clouds
[J].
基于几何特征的无人机激光雷达电力线提取
[J].
Transmission line extraction from UAV-LiDAR based on geometric features
[J].
基于改进Hough变换的电力线提取
[J].
Power line extraction based on improved hough transform
[J].
激光雷达电力巡线点云自动分类方法研究
[J].
Research on automatic classification of point cloud scanned by LiDAR during power-line patrol
[J].DOI:10.5768/JAO201940.0602005 URL [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}