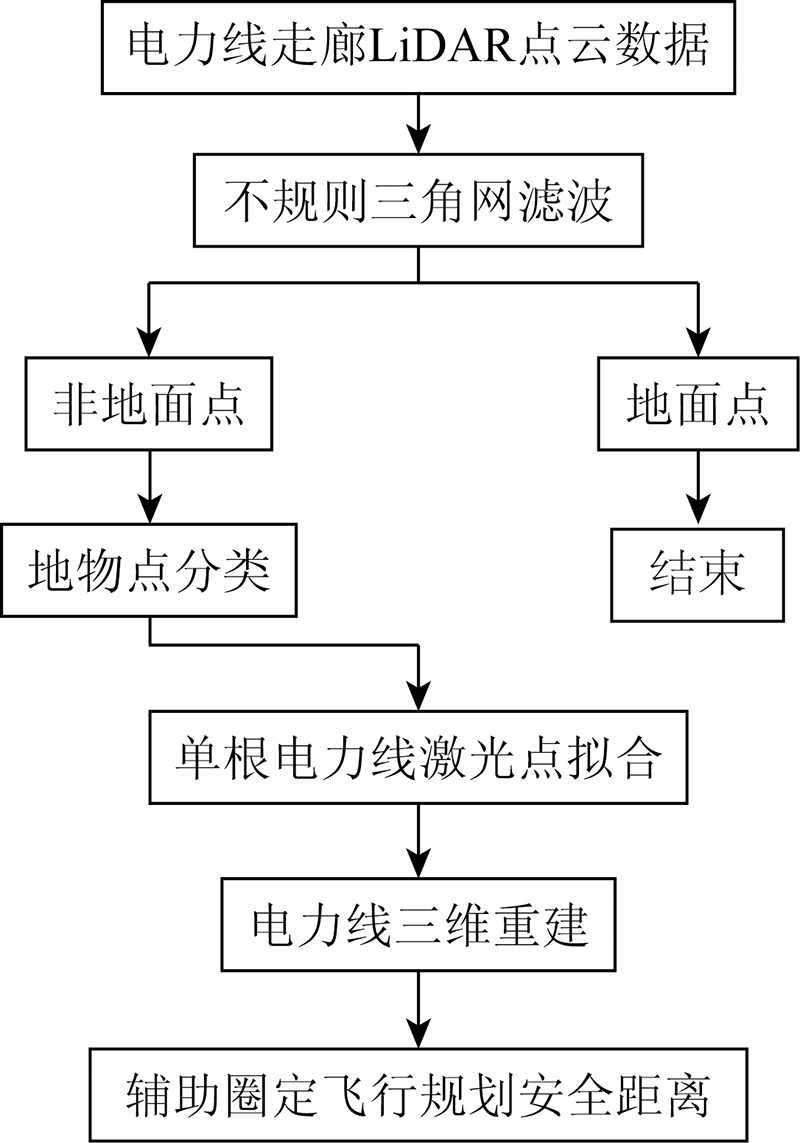
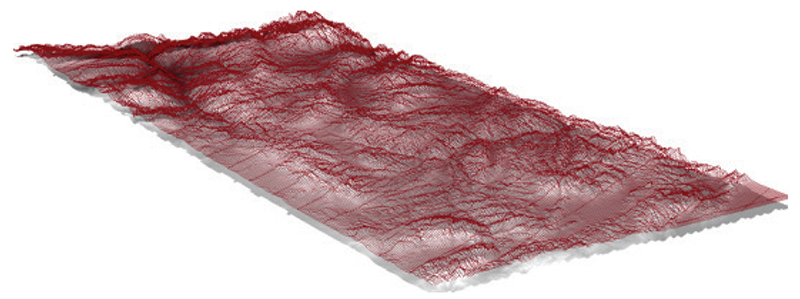
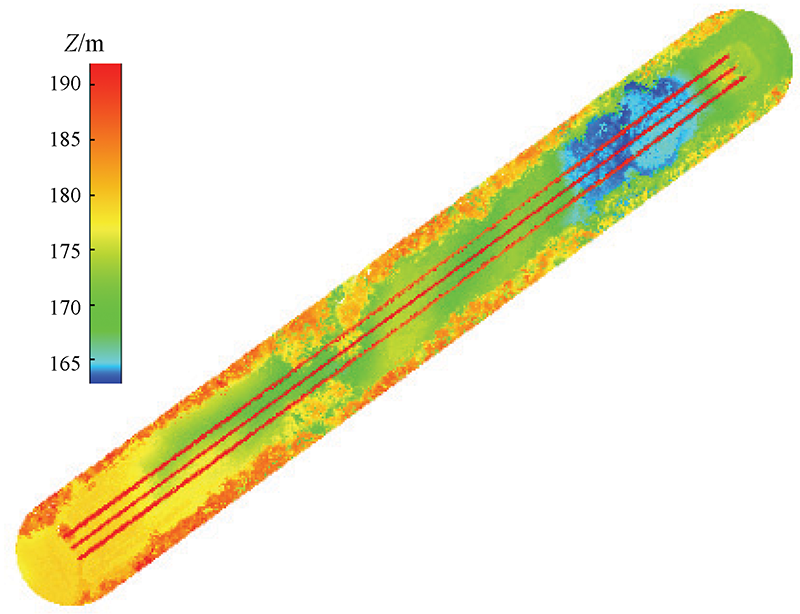
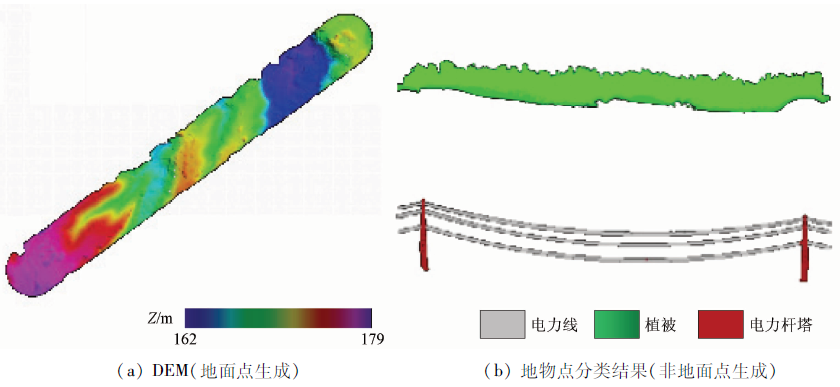
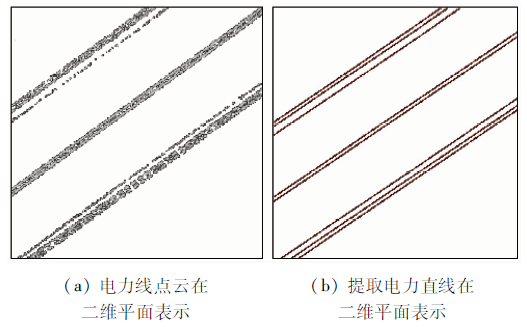
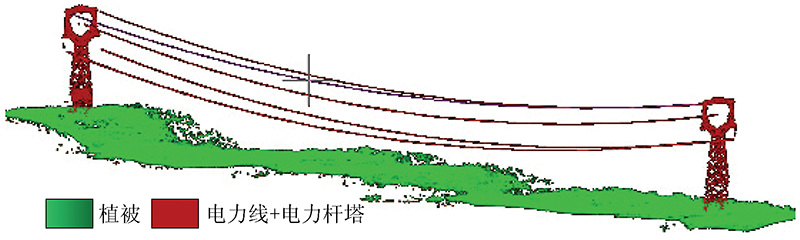
UAV airborne geophysical exploration has become an emerging branch of airborne geophysical exploration technology. To obtain high-quality measured data in UAV airborne geophysical exploration, it is necessary to plan UAV flight trajectory according to the application characteristics of airborne geophysical exploration. Focusing on the demand for 3D planning of UAV flight trajectory and autonomous obstacle avoidance, this paper studied the 3D information extraction technology of ground obstacles based on point cloud data of UAV LiDAR and extracted ground points and non-ground points (e.g., transmission towers, power line points, and vegetation points). The construction of terrain information and the 3D reconstruction of transmission towers and power lines will provide important primary data for UAV 3D flight trajectory planning software.
吴芳, 李瑜, 金鼎坚, 李天祺, 郭华, 张琦洁. 无人机三维地障信息提取技术应用于航空物探飞行轨迹规划[J]. 自然资源遥感, 2022, 34(1): 286-292.
WU Fang, LI Yu, JIN Dingjian, LI Tianqi, GUO Hua, ZHANG Qijie. Application of 3D information extraction technology of ground obstacles in the flight trajectory planning of UAV airborne geophysical exploration. Remote Sensing for Natural Resources, 2022, 34(1): 286-292.
Li J F, Li W J, Qin X W, et al. Trial survey of a novel UAV-borne magnetic system in the Duobaoshan ore district[J]. Geophysical and Geochemical Exploration, 2014, 38(4):846-850.
Li W J, Li J F, Liu S K, et al. The progress in the development of the integrated UAV magnetic and radiation survey system[J]. Acta Geoscientica Sinica, 2014, 35(4):399-403.
Yu J, Mu C, Feng Y M, et al. Powerlines extraction techniques from airborne LiDAR data[J]. Geomatics and Information Science of Wuhan University, 2011, 36(11):1275-1279.
Ruan J, Tao X J, Wei X K, et al. 3D modeling and tree barrier analysis of transmission lines based on LiDAR point cloud data of fixed wing UAV[J]. Southern Energy Construction, 2019, 6(1):114-118.
[5]
Sohn H B K A. Point-based classification of power line corridor scene using random forests[J]. American Society for Photogrammetry and Remote Sensing, 2013, 13:821-833.
Wang H P, Xia S B, Tan H W, et al. Key technologies of airborne Laser point cloud process in power line patrol[J]. Geospatial Information, 2015, 13(5):59-62.
Ye Q Q, Wu D Z, Li W H. Powerline danger point detection using UAV LiDAR point cloud[J]. Bulletin of Surveying and Mapping, 2015(11):57-59.
[9]
Axelsson P. DEM generation from Laser scanner data using adaptive TIN models[J]. International Archives of Photogrammetry and Remote Sensing, 2000(b4):110-117.
Su W, Zhao X F, Zhang M Z, et al. Extracting flying obstacles using airborne LiDAR point cloud data[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 12(48):79-85.
Wu F, Zhang Z G, Guo Z C, et al. Method of deriving DEM in the mining area based on filtering of airborne LiDAR data[J]. Remote Sensing for Land and Resources, 2015, 27(1):62-67.doi: 10.6046/gtzyyg.2015.01.10.
doi: 10.6046/gtzyyg.2015.01.10
Sui L C, Zhang Y B, Zhang S, et al. Filtering of airborne LiDAR point cloud data based on progressive TIN[J]. Geomatics and Information Science of Wuhan University, 2011, 36(10):1159-1163.
Ma W F, Wang J L, Wang C, et al. An extraction algorithm of power lines from airborne LiDAR point clouds[J]. Journal of Geomatics Science and Technology, 2019, 36(1):39-44.
Zhao H J, Tan J X, Lei J, et al. Transmission line extraction from UAV-LiDAR based on geometric features[J]. Bulletin of Surveying and Mapping, 2020(s1):145-150.
You A Q, Pan X D, Zhao P, et al. Research on automatic classification of point cloud scanned by LiDAR during power-line patrol[J]. Journal of Applied Optics, 2019, 40(6):1077-1083.
doi: 10.5768/JAO201940.0602005
 2022, Vol. 34
2022, Vol. 34  ), 李瑜(
), 李瑜(