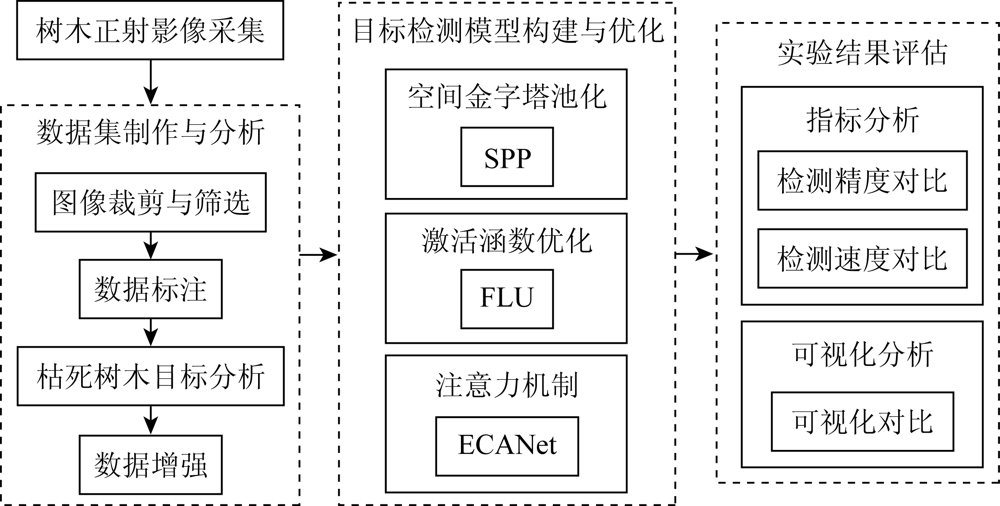
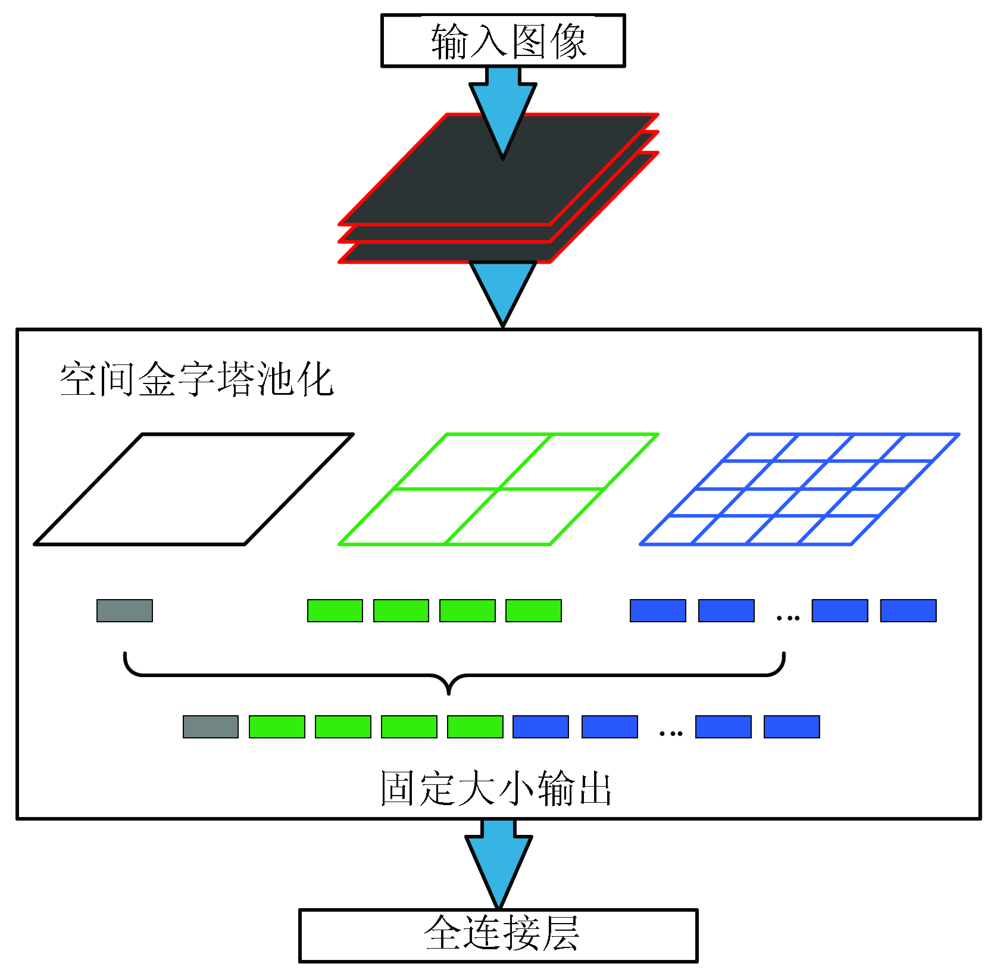
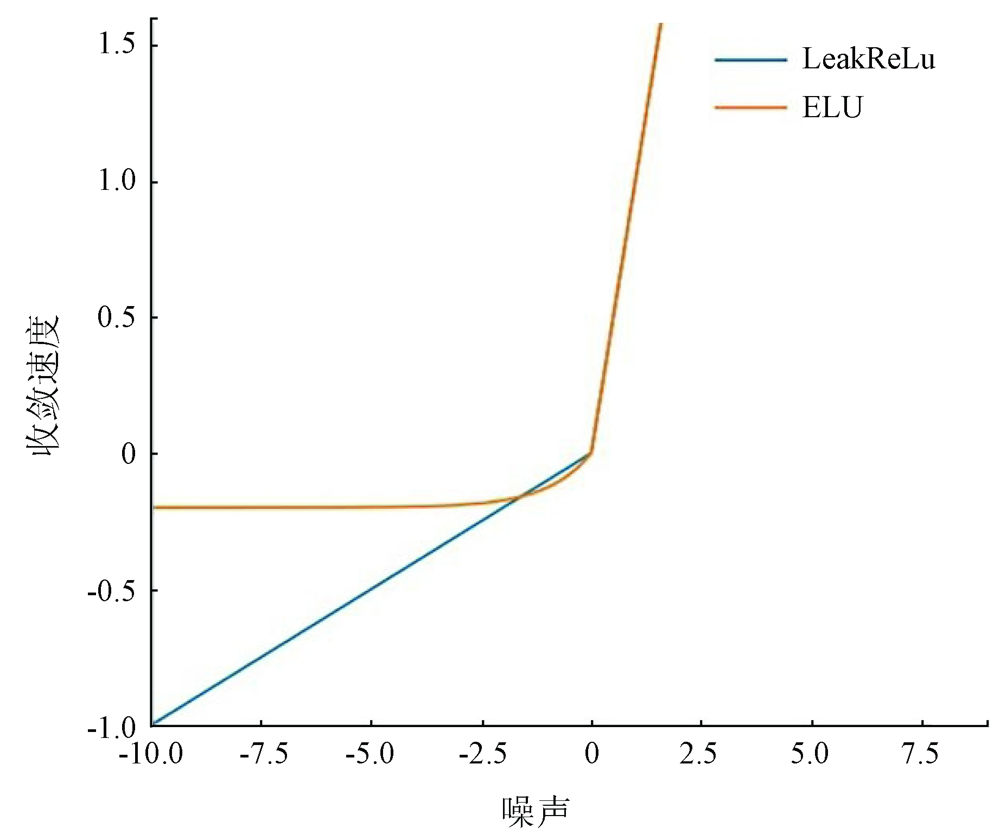
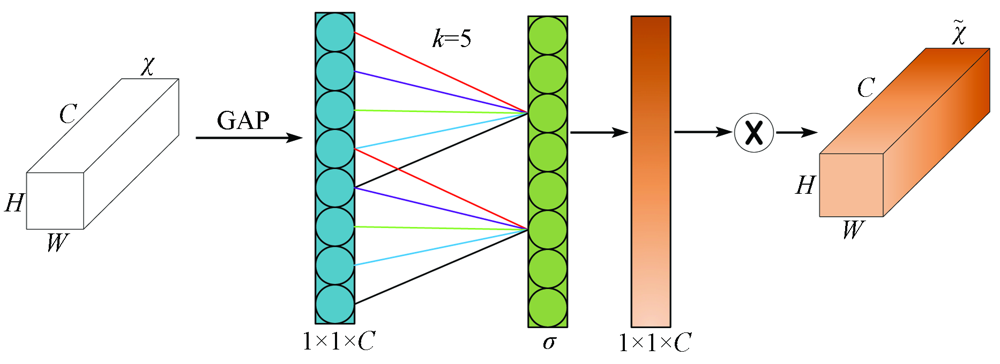
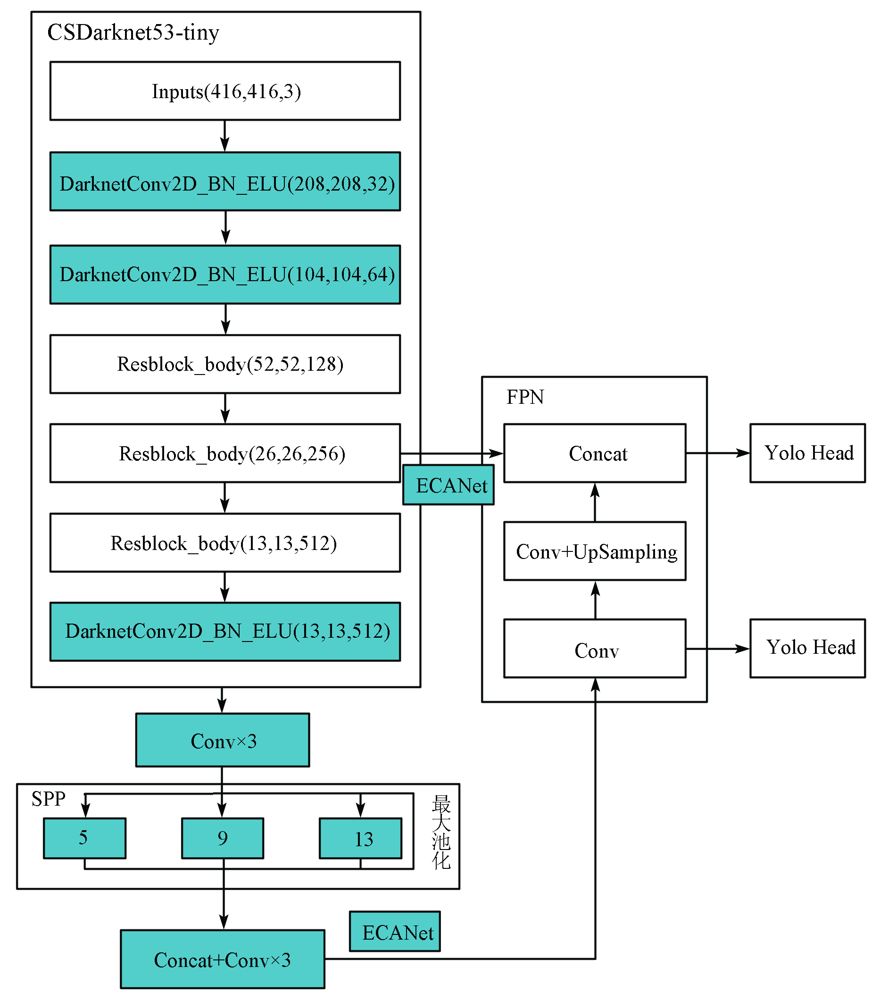
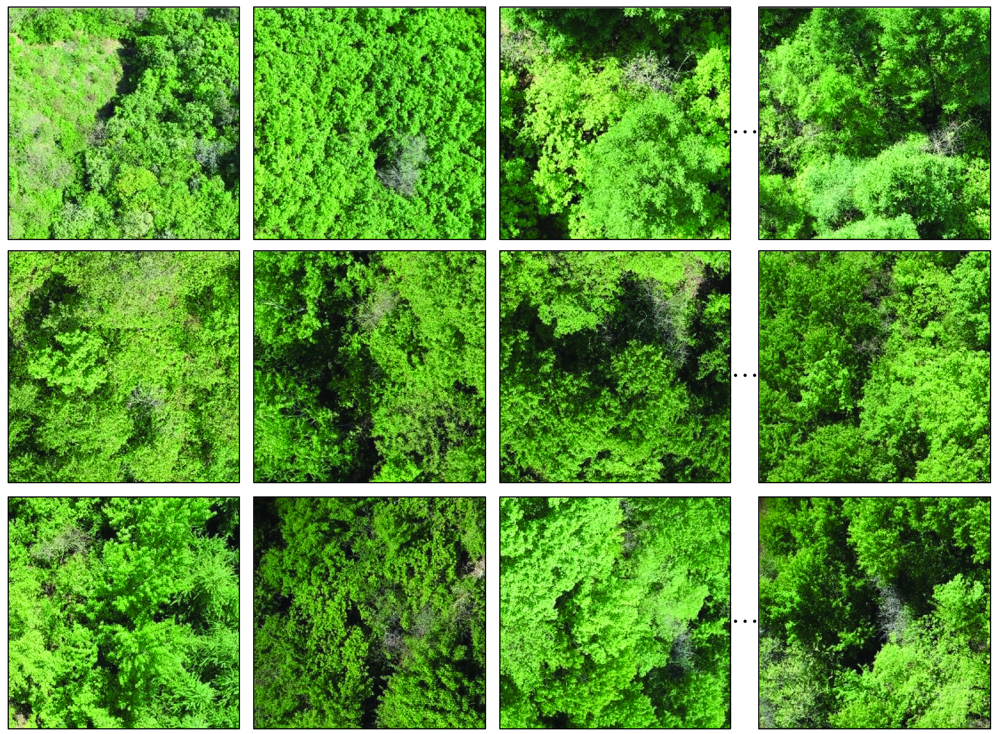
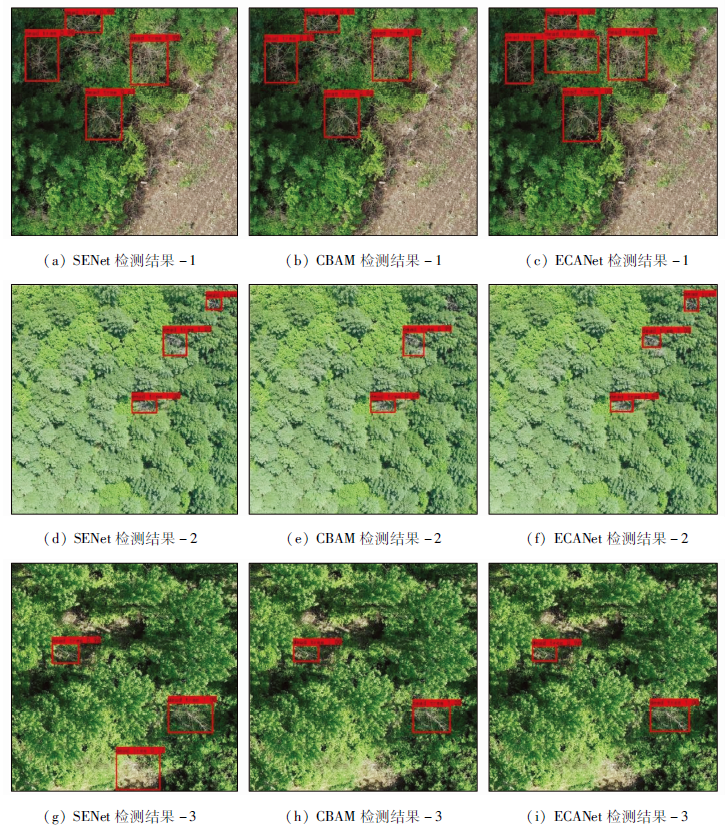
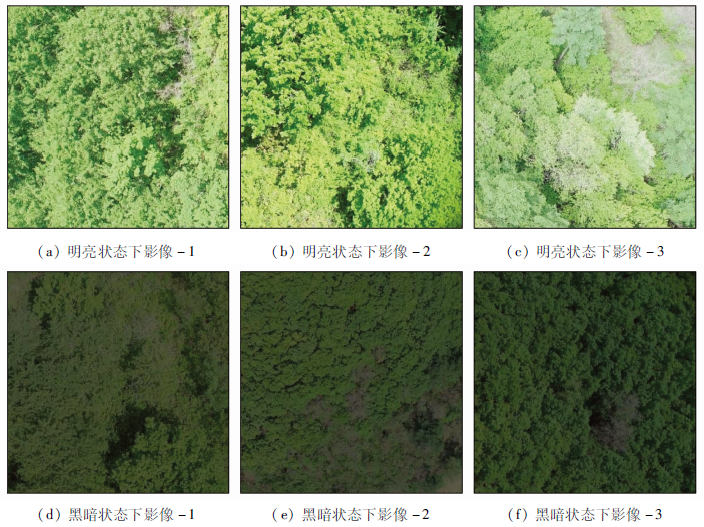
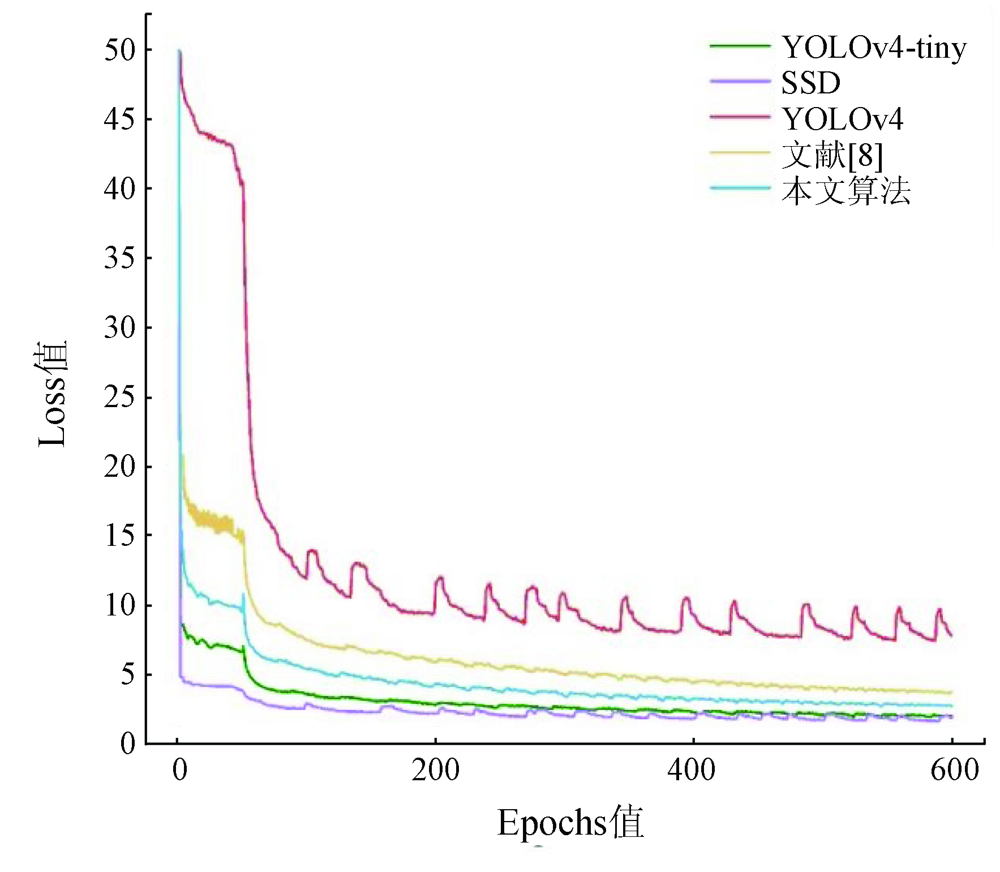
The current dead tree detection primarily relies on manual field surveys and, thus, is limited by forest topography, suffers a low detection efficiency, and is dangerous. Given these problems, this study proposed a YOLOv4-tiny dead tree detection algorithm based on the attention mechanism and spatial pyramid pooling (SPP) and improved the original detection model. First, the SPP structure was introduced after the Backbone part of the model to combine local and global features and enrich the feature representation capability of the model. Then, the original activation function LeakyReLU in the model was replaced with ELU, which made the activation function saturate unilaterally, thus improving the convergence and robustness of the model. Finally, the attention mechanism ECANet was introduced into the model to enhance the capacity of the network to learn important information in images, thus improving the performance of the network. The images of trees in a mountain forest of a scenic area in southern Liaoning were collected using an unmanned aerial vehicle (UAV). Then, dead trees in these images were detected using different models. The detection results show that the improved algorithm had a detection accuracy of 93.25%, which was improved by 9.58%, 12.57%, 10.54%, and 4.87% than that of the YOLOv4-tiny, YOLOv4, and SSD algorithms and an algorithm stated in literature [8], respectively, and achieved the effective detection of dead trees.
金远航, 徐茂林, 郑佳媛. 基于改进YOLOv4-tiny的无人机影像枯死树木检测算法[J]. 自然资源遥感, 2023, 35(1): 90-98.
JIN Yuanhang, XU Maolin, ZHENG Jiayuan. A dead tree detection algorithm based on improved YOLOv4-tiny for UAV images. Remote Sensing for Natural Resources, 2023, 35(1): 90-98.
Kamińska A, Lisiewicz M, Stereńczak K, et al. Species-related single dead tree detection using multi-temporal ALS data and CIR imagery[J]. Remote Sensing of Environment, 2018, 219:31-43.
doi: 10.1016/j.rse.2018.10.005
Bi K, Li Y C, Ding X B, et al. Aerial photogrammetric technology of light small UAV:Status and trend of development[J]. Bulletin of Surveying and Mapping, 2015(3):27-31,48.
Wang P, Luo X W, Zhou Z Y, et al. Key technology for remote sensing information acquisition based on micro UAV[J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(18):1-12.
[4]
Kamińska A, Lisiewicz M, K Stereńczak, et al. Species-related single dead tree detection using multi-temporal ALS data and CIR imagery[J]. Remote Sensing of Environment, 2018, 219:31-43.
doi: 10.1016/j.rse.2018.10.005
[5]
Manandhar A, Hoegner L, Stilla U. Palm tree detection using circular autocorrelation of polar shape matrix[J]. ISPRS Annals of Photogrammetry,Remote Sensing and Spatial Information Sciences, 2016, 3:465-472.
Song Y N, Liu W P, Luo Y Q, et al. Monitoring of dead trees in forest images based on linear spectral clustering[J]. Scientia Silvae Sinicae, 2019, 55(4):187-195.
[7]
Culman M, Delalieux S, Van Tricht K. Individual palm tree detection using deep learning on RGB imagery to support tree inventory[J]. Remote Sensing, 2020, 12(21):3476.
doi: 10.3390/rs12213476
Wang X Y, Lyu F, Yi Z Y. Research on lawn tree detection method based on deep learning[J]. Journal of Chinese Agricultural Mechanization, 2021, 42(7):136-141.
[9]
Yu R, Luo Y, Zhou Q, et al. Early detection of pine wilt disease using deep learning algorithms and UAV-based multispectral imagery[J]. Forest Ecology and Management, 2021, 497:119493.
doi: 10.1016/j.foreco.2021.119493
Li H B, Sun Y, Zhang W M, et al. The detection method for coal dust caused by chute discharge based on YOLOv4-tiny[J]. Opto-Electronic Engineering, 2021, 48(6):73-86.
[11]
Bochkovskiy A, Wang C Y, Liao H Y M. YOLOv4:Optimal speed and accuracy of object detection[J]. Computer Vision and Pattern Recognition, 2020, 17(9):198-215.
[12]
Lin T Y, Dollár P, Girshick R, et al. Feature pyramid networks for object detection[C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017:2117-2125.
[13]
He K, Zhang X, Ren S, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9):1904-1916.
doi: 10.1109/TPAMI.2015.2389824
pmid: 26353135
[14]
Clevert D A, Unterthiner T, Hochreiter S. Fast and accurate deep network learning by exponential linear units (ELUS)[C]// Proceedings of the 4th International Conference on Learning Representations.ICLR, 2015:375-387.
[15]
Wang Q, Wu B, Zhu P, et al. ECA-Net:Efficient channel attention for deep convolutional neural networks[C]// CVF Conference on Computer Vision and Pattern Recognition.Seattle.IEEE, 2020:11531-11539.
[16]
Hu J, Shen L, Sun G. Squeeze-and-excitation networks[C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018:7132-7141.
Zhao J L, Zhang X Z, Dong H Y. Defect detection in transmission line based on scale-invariant feature pyramid networks[J]. Computer Engineering and Applications, 2022, 58(8):289-296.
doi: 10.3778/j.issn.1002-8331.2010-0192
[18]
Everingham M, Van Gool L, Williams C K I, et al. The pascal visual object classes (voc) challenge[J]. International Journal of Computer Vision, 2010, 88(2):303-338.
doi: 10.1007/s11263-009-0275-4
Guo X Z, Yao Y J, Jia K, et al. Information extraction of Mars dunes based on U-Net[J]. Remote Sensing for Natural Resources, 2021, 33(4):130-135.doi:10.6046/zrzyyg.2020397.
doi: 10.6046/zrzyyg.2020397
 2023, Vol. 35
2023, Vol. 35  ), 徐茂林(
), 徐茂林(