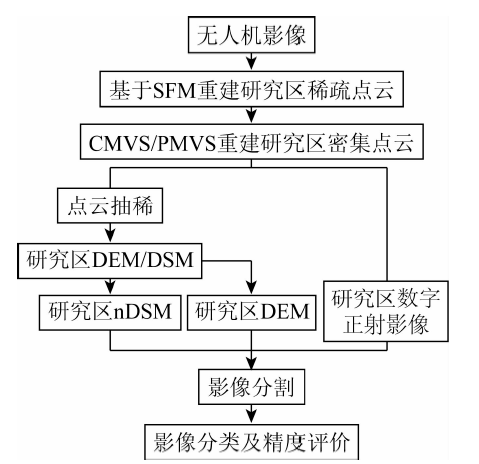
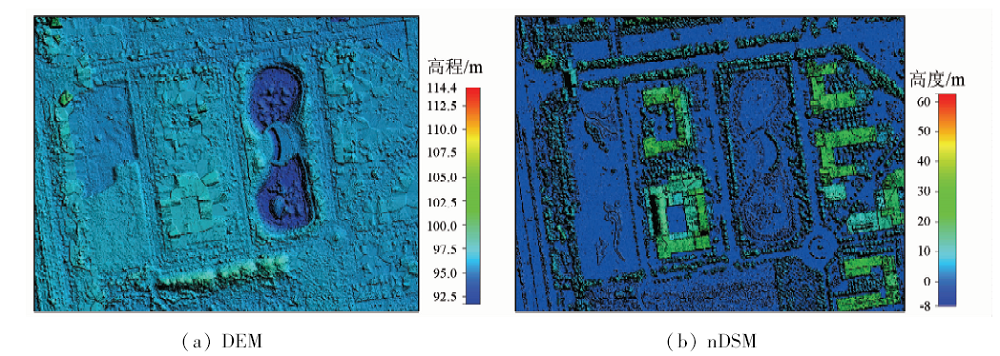
针对以往无人机遥感用于城市植被分类时多利用影像光谱、纹理和形状等特征,影像重建点云数据未能充分利用的问题,提出一种综合影像重建点云与光谱信息的城市植被分类方法。首先,基于运动恢复结构(structure from motion,SFM)、多视图聚簇(cluster multi view stereo,CMVS)和基于面片模型的密集匹配(patch based multi view stereo,PMVS)算法重建研究区密集点云; 然后,经滤波、插值生成研究区数字高程模型(digital elevation model,DEM)和归一化数字表面模型(normalized digital surface model,nDSM),同时结合影像光谱信息对不同高度的城市植被进行分类提取; 最后,采用面向对象的影像分析方法,根据nDSM信息与归一化绿红差异指数(normalized green-red difference index,NGRDI)及可见光波段差异植被指数(visible-band difference vegetation index,VDVI)等光谱信息,分别建立了水生植被、草地、灌木、小乔木和乔木等不同植被的分类规则。实验结果表明综合利用影像重建点云得到的nDSM信息与影像光谱信息提取不同高度的植被是可行的,总体分类精度达到92.08%。该方法可为城市植被分类与制图提供理论支持和应用参考。
In order to solve the problem that unmanned aerial vehicle (UAV) remote sensing for urban vegetation classification usually uses the spectral texture and shape features information, while the reconstruction point cloud data of image fail to be fully used, the authors put forward a new method of comprehensive reconstruction point cloud and spectral information of image to extract the vegetation. The dense cloud of the study area was reconstructed based on structure from motion(SFM), cluster multi view stereo (CMVS) and patch based multi view stereo (PMVS) algorithm, and the digital elevation model (DEM) and normalized digital surface model (nDSM) of the study area were generated based on filtering and interpolation, meanwhile in combination with the spectral information of image the urban vegetation with different heights was extracted. On the basis of object-oriented image analysis method in combination with the nDSM information and spectral information including normalized green-red difference index and visible-band difference vegetation index, the classification rules of different vegetation, such as aquatic vegetation, grassland, shrub, small tree, and tree, were established. The experimental results show that the integration of the nDSM from point cloud data of image and spectral information to extract the vegetation with different heights is feasible, and the overall classification accuracy is 92.08%. The results obtained by the authors can provide theoretical support and application reference for urban vegetation classification and mapping.
李莹, 于海洋, 王燕, 吴建鹏, 杨礼. 基于无人机重建点云与影像的城市植被分类[J]. 国土资源遥感, 2019, 31(1): 149-155.
Ying LI, Haiyang YU, Yan WANG, Jianpeng WU, Li YANG. Classification of urban vegetation based on unmanned aerial vehicle reconstruction point cloud and image. Remote Sensing for Land & Resources, 2019, 31(1): 149-155.
Yang L, Chen Y H, Yue D P , et al. Information extraction of urban green space based on UAV remote sensing image[J]. Science of Surveying and Mapping, 2017,42(2):59-64.
Tian Z K, Fu Y Y, Liu S H , et al. Rapid crops classification based on UAV low-altitude remote sensing[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013,29(7):109-116.
Wang X Q, Wang M M, Wang S Q , et al. Extraction of vegetation information from visible unmanned aerial vehicle images[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015,31(5):152-159.
Jing R, Deng L, Zhao W J , et al. Object-oriented aquatic vegetation extracting approach based on visible vegetation indices[J]. Chinese Journal of Applied Ecology, 2016,27(5):1427-1436.
Zhou Z M, Yang Y M, Chen B Q . Study on the extraction of exotic species Spartina alterniflora from UAV visible images[J]. Journal of Subtropical Resources and Environment, 2017,12(2):90-95.
[6]
Wu C C . VisualSFM: A visual structure from motion system[EB/OL]. .
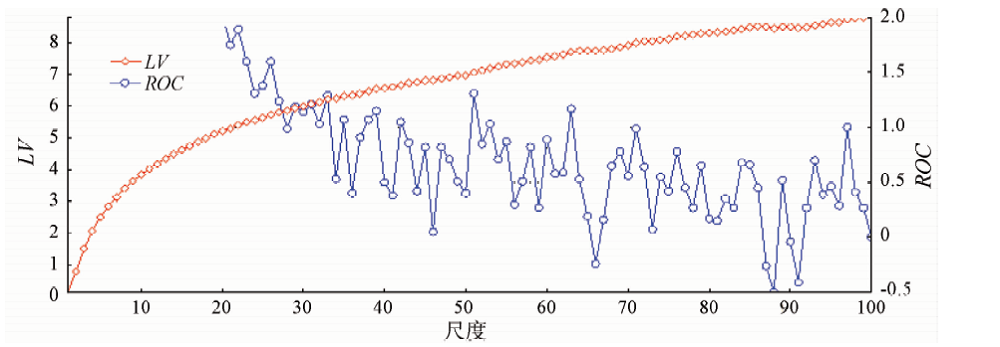
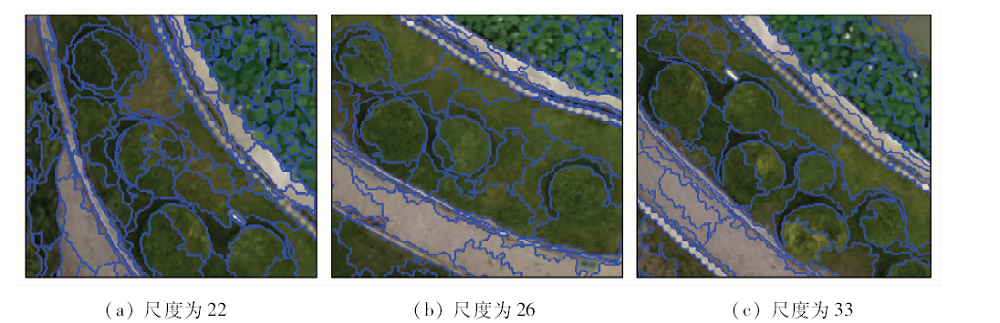
Su W, Li J, Chen Y H , et al. Object-oriented urban land-cover classification of multi-scale image segmentation method——A case study in Kuala Lumpur City Center,Malaysia[J]. Journal of Remote Sensing, 2007,11(4):521-530.
He Y H, Yue J . Research and implementation based on multi-view dense matching by applying CMVS/PMVS[J]. Journal of Geomatics, 2013,38(3):20-23.
[9]
Furukawa Y, Ponce J . Accurate camera calibration from multi-view stereo and bundle adjustment[J]. International Journal of Computer Vision, 2009,84(3):257-268.
doi: 10.1007/s11263-009-0232-2
Li J L, Li B B, Liu F M , et al. Generating 3D model of slope eroded gully based on photo reconstruction technique[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015,31(1):125-132.
[11]
方磊 . 基于特征的图像序列三维场景重建技术研究[D]. 武汉:华中科技大学, 2006.
Fang L . Research on Feature Based 3D Scene Reconstruction Techniques from Image Sequence[D]. Wuhan:Huazhong University of Science and Technology, 2006.
[12]
戴嘉境 . 基于多幅图像的三维重建理论及算法研究[D]. 上海:上海交通大学, 2012.
Dai J J . Research on the Theory and Algorithms of 3D Reconstruction from Multiple Images[D]. Shanghai:Shanghai Jiao Tong University, 2012.
Zhang P, Wang S D, Huang J P , et al. Research on building point cloud reconstruction method based on SFM and CMVS/PMVS[J]. Journal of Suzhou University of Science and Technology(Natural Science), 2015,32(3):60-64.
Fu Y Z, Wang X Q . Analysis of vegetation indices based on the CCD data of BJ-1[J]. Science of Surveying and Mapping, 2010,35(6):35-38.
[15]
Meyer G E, Neto J C . Verification of color vegetation indices for automated crop image application[J]. Computers and Electronics in Agriculture, 2008,63(2):282-293.
doi: 10.1016/j.compag.2008.03.009
 2019, Vol. 31
2019, Vol. 31  ), 王燕, 吴建鹏, 杨礼
), 王燕, 吴建鹏, 杨礼