Research on smartphone based UAV low-altitude oblique photogrammetry system and its applications
BI Weihua1,3(), ZHAO Xingtao2, YANG Huachao3(), BIAN Hefang3, ZHANG Qiuzhao3
1. Wanbei Coal & Electricity Co. Ltd., Suzhou 234002, China; 2. Beijing Dixin Technology Co., Ltd., Beijing 100086, China 3. School of Environment & Spatial Informatics, China University of Mining and Technology, Xuzhou 221116, China;
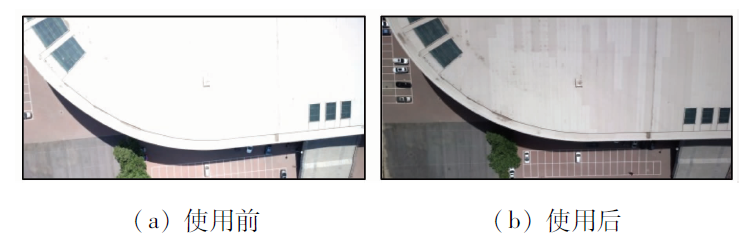
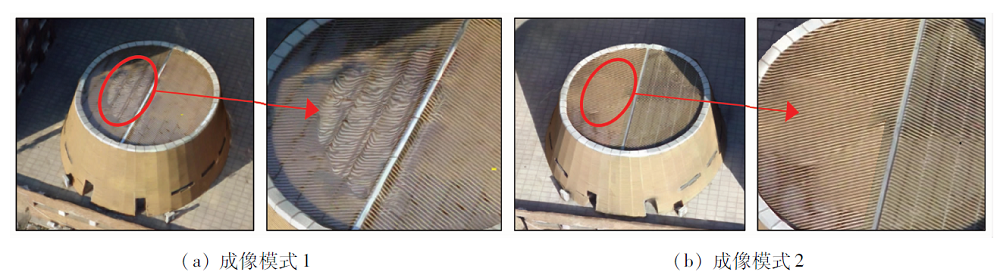
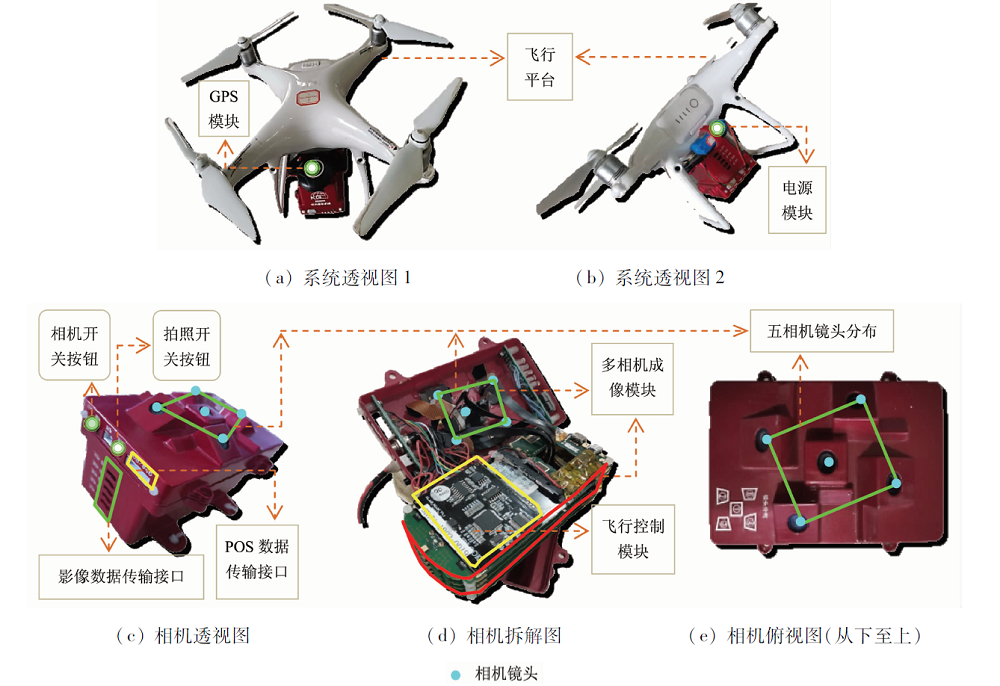
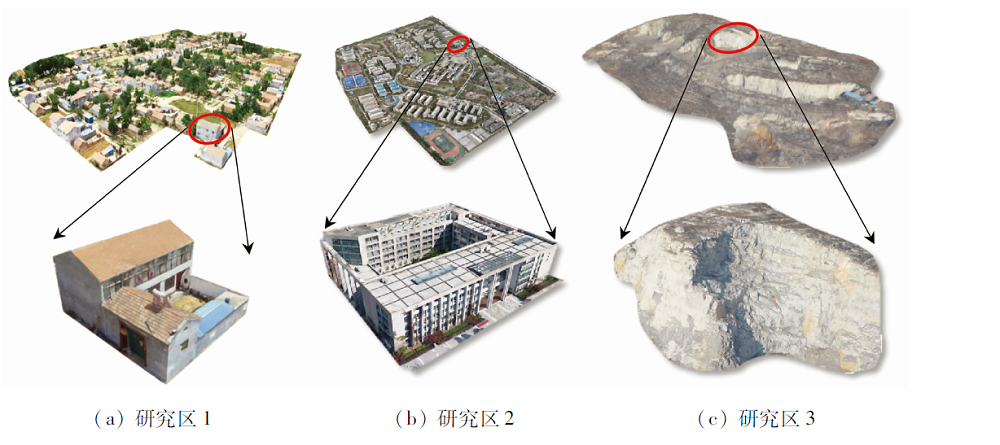
In order to facilitate the low-cost, ultra-light weight and easier operation, the authors constructed a smartphone based unmanned aerial vehicle (UAV) low altitude oblique photogrammetric system by integrating DJI Phantom 4 UAV flight platform with good flight traits and Nokia 808 PureView mobile phones with good image-taking functions. In this system, relative functions of multi-camera imaging system with mobile phones were optimized, and the module design method was adopted for the system which includes the measurement of improving image quality, and the design of flight control module used for automatically image-taking control developed by open source flight control system, the design of the POS module and some other means. The integrating mode by the multi-camera system adopted as payload and flight platform was discussed, and then the working flow of the integrated system was concluded. The system was used for different applicable fields, i.e., real estate surveying, open-pit mine monitoring, and 3D reconstruction of urban buildings. The application results assessed by check points measured with field work and manual vision inspect indicate that the real-world 3D model has better texture quality, and the digital survey and mapping products, real-world 3D model and digital linear graph as well as some other means have higher geometric accuracy with centimeter level. The proposed system will be very important for boosting the development of UAV low altitude oblique photogrammetry in terms of practical demands.
毕卫华, 赵星涛, 杨化超, 卞和方, 张秋昭. 基于智能手机的无人机低空倾斜摄影测量系统及其应用研究[J]. 国土资源遥感, 2021, 33(2): 248-255.
BI Weihua, ZHAO Xingtao, YANG Huachao, BIAN Hefang, ZHANG Qiuzhao. Research on smartphone based UAV low-altitude oblique photogrammetry system and its applications. Remote Sensing for Land & Resources, 2021, 33(2): 248-255.
Yu Z D, Li H, Ba F, et al. 3D city model construction based on a consumer-grade UAV[J]. Remote Sensing for Land and Resources, 2018, 30(2):67-72.doi: 10.6046/gtzyyg.2018.02.09.
doi: 10.6046/gtzyyg.2018.02.09
Li A F, Zeng Z X. The analysis of the development of oblique photography technique in China[J]. Geomatics and Spatial Information Technology, 2014, 37(9):57-62.
Bi K, Li Y C, Ding X B, et al. Aerial photogrammetric technology of light small UAV:Status and trend of development[J]. Bulletin of Surveying and Mapping, 2015(3):27-31.
[4]
Colomina I, Molina P. Unmanned aerial systems for photogrammetry and remote sensing:A review[J]. ISPRS Journal of Photogrammetry and Remote Sensing 2014, 92(2):79-97.
doi: 10.1016/j.isprsjprs.2014.02.013
[5]
Takeuchi K, Kennelly P J. ISeismometer:A geoscientific iPhone application[J]. Computers & Geosciences, 2010, 36(4):573-575.
doi: 10.1016/j.cageo.2009.09.012
[6]
Wang T H, Han W T, Zhang M F, et al. Unmanned aerial vehicle-borne sensor system for atmosphere-particulate-matter measurements:Design and experiments[J]. Sensors, 2020, 20(1),57.
doi: 10.3390/s20010057
[7]
Slawomir P, Arkadiusz G, Piotr L, et al. Developing of low-cost air pollution sensor:Measurements with the unmanned aerial vehicles in Poland[J]. Sensors, 2020, 20(1),58.
doi: 10.3390/s20010058
[8]
Zhang Y H, Peng C, Mou D, et al. An adaptive filtering approach based on the dynamic variance model for reducing MEMS gyroscope random error[J]. Sensors, 2018, 18(11):3943-3957.
doi: 10.3390/s18113943
[9]
Chen Z H, Zhu Q C, Soh Y C. Smartphone inertial sensor based indoor localization and tracking with iBeacon corrections[J]. IEEE Transactions on Industrial Informatics, 2016, 12(4):1540-1549.
doi: 10.1109/TII.2016.2579265
[10]
Kim J, Lee S K, Ahn H Y, et al. Feasibility of employing a smartphone as the payload in a photogrammetric UAV system[J]. ISPRS Journal of Photogrammetry and Remote Sensing 2013, 79(3):1-18.
doi: 10.1016/j.isprsjprs.2013.02.001
[11]
Yang K, Yang G Y, Fu H I. Research of control system for plant protection UAV based on Pixhawk[J]. Procedia Computer Science, 2020, 166:371-375.
doi: 10.1016/j.procs.2020.02.082
[12]
Furukawa Y, Ponce J. Accurate,dense and robust multi-view Stereopsis[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(8):1362-1376.
doi: 10.1109/TPAMI.2009.161
 2021, Vol. 33
2021, Vol. 33  ), 赵星涛2, 杨化超3(
), 赵星涛2, 杨化超3(