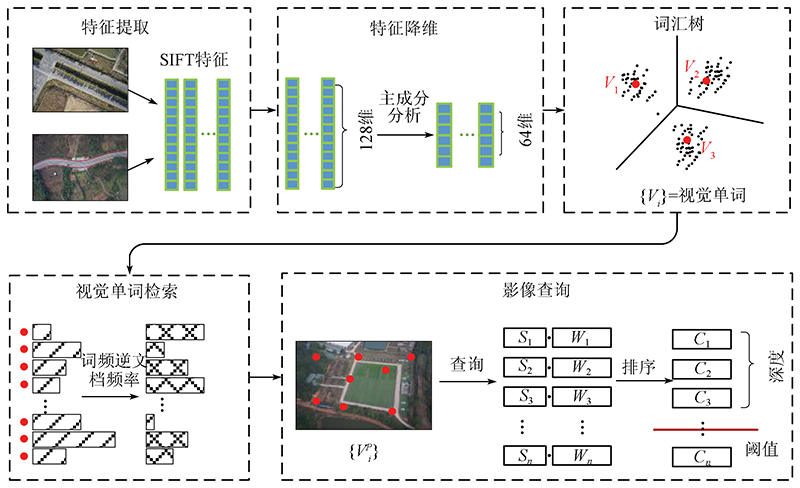
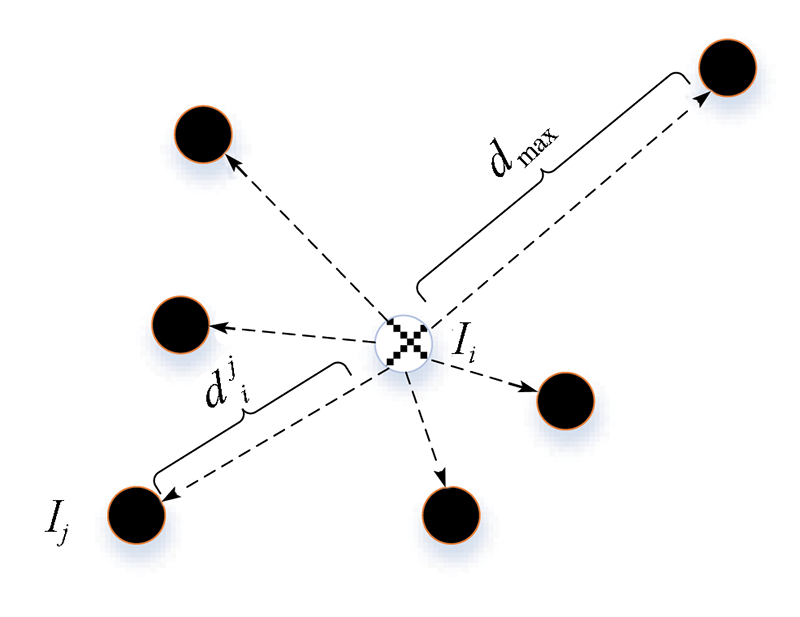
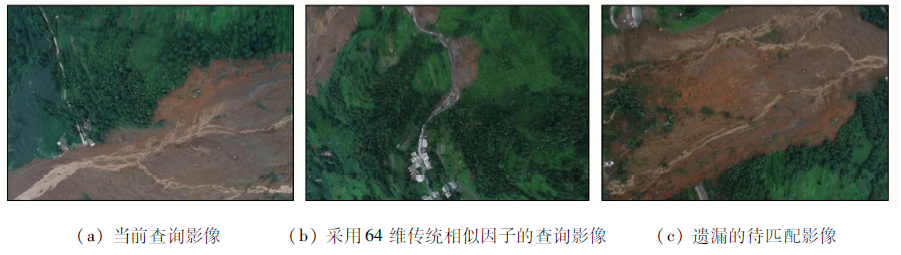
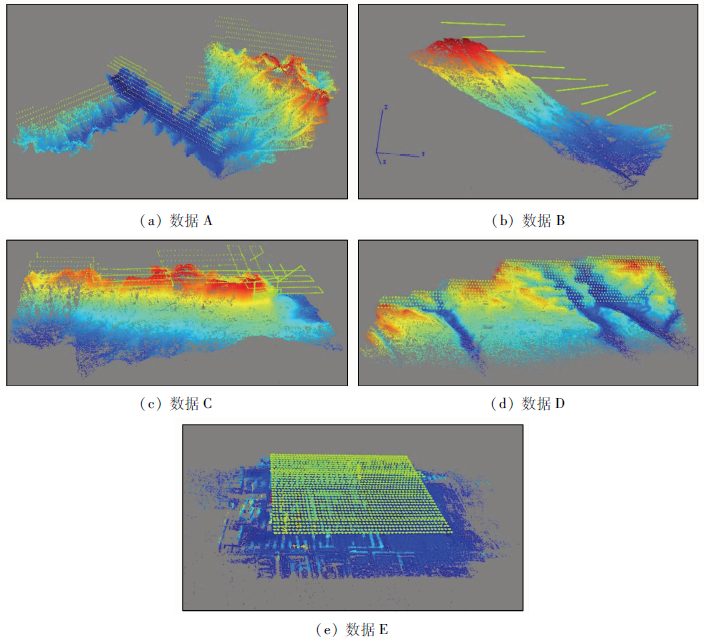
To overcome the shortcomings such as poor adaptability, low efficiency, and the demand for prior knowledge in the 3D reconstruction using UAV images, this study proposed a method for extracting match pairs of UAV images considering geospatial information. The steps of this method are stated as follows. Firstly, reduce high-dimensional features of the images to low-dimensional features using the principal component analysis (PCA) method to improve the construction efficiency of the retrieval vocabulary. Secondly, construct a comprehensive retrieval factor by calculating the inverse distance weighting factor between query images to improve the distinguishability between similar images. Finally, discard invalid match pairs by calculating the retrieval threshold to improve the query precision of images. The experimental results show that, compared to the traditional footprint map method and 128-dimensional feature retrieval method, this method enjoys higher processing efficiency and more comprehensive sparse reconstruction results, especially for the massive UAV data.
Lei T J, Li C C, He X Y. Application of aerial remote sensing of pilotless aircraft to disaster emergency rescue[J]. Journal of Natural Disasters, 2011, 20(1):178-183.
Huang H F, Yi W, Zhang G D, et al. Method of using micro-VAVRS in engineering geological investigation and design for emergency control of landslides[J]. Journal of Disaster Prevention and Mitigation Engineering, 2017, 37(1):99-104.
Yu B C, Chen G, Duan M R, et al. UAV RS applied in 3D reconstruction of huge immovable cultural relics[J]. Bulletin of Surveying and Mapping, 2017(5):43-46.
He H Q. The study of strips reconstruction oriented data processing methodology in low-altitude photogrammetry[J]. Acta Geodaetica et Cartographica Sinica, 2014, 43(4):440.
Xiao X W, Guo B X, Li D R, et al. A quick and affine invariance matching method for oblique images[J]. Acta Geodaetica et Cartographica Sinica,2015, 44(4):414-421.
Yan L, Fei L, Ye Z Y, et al. Automatic tie-points extraction for triangulation of large-scale oblique multi-view images[J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(3):310-317.
[8]
David G L. Distinctive image feature from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60(2):91-110.
doi: 10.1023/B:VISI.0000029664.99615.94
[9]
Morel J M, Yu G. ASIFT:A new framework for fully affine invariant image comparison[J]. SIAM Journal on Imaging Sciences, 2009, 2(2):438-469.
doi: 10.1137/080732730
[10]
Wu C. SiftGPU:A GPU implementation of scale invariant feature transform(SIFT)[EB/OL].(2013 -03-11)[2021-02-07].https://github.com/pitzer/SiftGPU.
[11]
Agarwal S, Snavely N, Simon I, et al. Building rome in a day[C]// 12th International Conference on Computer Vision.IEEE, 2009:72-79.
[12]
Snavely N, Seitz S, Szeliski R. Photo tourism:Exploring photo collections in 3D[C]// Special Interest Group on Computer Graphics and Interactive Techniques Conference.ACM, 2006, 25(3):835-846.
[13]
Johannes L, Schonberger,Frahm J M.Structure-from-motion revisited[C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition.IEEE, 2016:1-10.
Li J P, Jiang T, Xiao D, et al. On diagram-based three-dimensional reconstruction of UAV image[J]. Optics and Prcesion Engineering, 2016, 24(6):1501-1509.
Jiang S, Xu Z H, Zhang F, et al. Solution for efficient SfM reconstruction of oblique UAV images[J]. Geomatics and Information Science of Wuhan University, 2019, 44(8):1153-1160.
[17]
Sivic J, Zisserman A. Video Google:A text retrieval approach to object matching in videos[C]// International Conference on Computer Vision.IEEE, 2003:1470-1477.
[18]
Jegou H, Douze M, Schmid C. Hamming embedding and weak geometric consistency for large scale image search[C]// European Conference on Computer Vsion, 2008:304-317.
[19]
Schönberger J L, Price T, Sattler T, et al. A vote-and-verify strategy for fast spatial verification in image retrieval[C]// Asian Conference on Computer Vision.Springer, 2016:321-337.
[20]
Nister D, Stevenisu H. Scalable recognition with a vocabulary tree[C]// Computer Society Conference on Computer Vision and Pattern Recognition.IEEE, 2006:2161-2168.
 2022, Vol. 34
2022, Vol. 34  ), 蒲禹池, 张福强
), 蒲禹池, 张福强